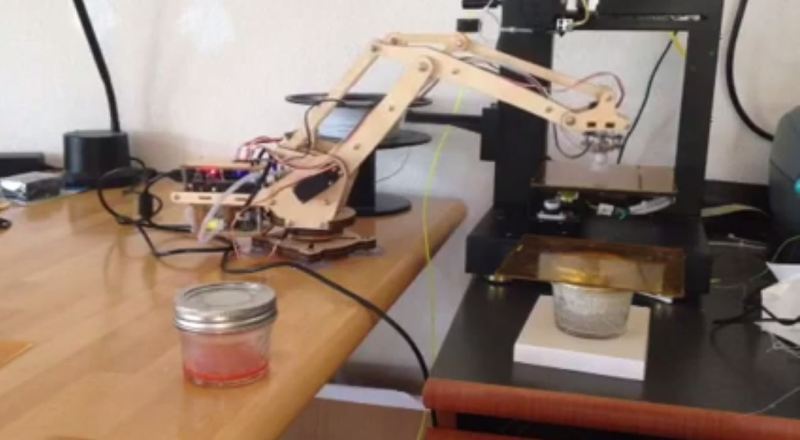
[Florian] has been hard at work creating this automated setup to queue jobs for his 3D printer in order for it to run while he’s not around. It’s not quite finished but the concept is there and he’s started doing some tests!
He’s using the uArm, which was a highly successful kickstarter earlier this year — it’s an Arduino-compatible microcontroller driven 4-axis parallel-mechanism robot arm, based off of the industrial ABB PalletPack robot.
As soon as he got all the parts he setup a quick test to replace the build platforms using the uArm.
Only problem we see now is that the 3D print will probably be in the middle! Replacing the bed is all fine and dandy, but it also needs to be secured. Normally [Florian] uses binder clips but those are way too finicky for a robot to try playing with, so instead he’s working on a magnetic clamping system that is both strong enough to hold the bed in place… and easy enough for the uArm to remove by itself:
We’re super excited to see the continued progress of this. Couple it with a dedicated computer with a webcam and some kind of remote desktop (the free version of TeamViewer works quite well) and you’ve got complete control of your setup on the road!















There’s got to be an easier way of preparing a new build platform?
There is. Spiritplumber did it over a year ago. As usual for this site.
http://www.youtube.com/watch?v=TRJRJJxBUIo
Thanks for linking that video! Here SpiritPlumber’s first video which explains it a bit more. What a smart mechanism. Very simple. Why isn’t it more popular?
Ugh… getting too old. Forgot to actually paste the link. Here is the link: https://www.youtube.com/watch?v=xef6TdkXVxY
Spiritplumber here – if anyone wants the schematic and code for the circuit, email me, it’s super simple; a L298 (with the two channels wired in parallel for extra current), three limit switches and a picaxe microcontroller.
I have absolutely no idea why ANY of spiritplumber’s stuff isn’t more popuplar.
– Prop-based universal navigation/com system in 2007
– Android-based autopilot in 2008.
[ break here while she was at NASA ]
– a better version of the openROV, which they “acquired” for their project
– $200 laser cutter http://igg.me/at/minilaser/
Seriously, I don’t know. She tries to get stuff up on HAD, she tries to hire competent marketing people, and everyone tries to hurt her at every turn. She’s had more people try to kill her than I had try to kill me when I was doing field operations.
Is that what being honest in Silicon Valley gets you?
Thank you! The Android NAVCOM stuff was in early 2010, though, not 2008 (I think the first Android antbot started moving around in January?)
The Antbot stuff is on my wiki, if anyone wants to make one.
electromagnets…turn them off when its time to replace the bed…and back on to center and secure the new bed
I thought about the same, but am wondering, if the heat from heatbed would affect those electromagnets.
How hot does a heatbed get? Temperatures over ~80 degrees Celsius is problematic for permanent magnets but for a properly done electromagnet it shouldn’t be. There is no Curie temperature to avoid and the only sensitive part is the isolation of the magnet winding.
Using the right kind of wire a work temperature above 220 degrees Celsius is possible and if one can source some special kinds of wire considerably higher temperatures are realistic.
just try it with pla first…don’t need to heat the bed (much, if at all)…crawl before industrial stomping
What could be even faster and less complex is using the robot only for unloading platforms and an automatic platform feeder on the opposite side of the printer. The robot would only have to grab the platforms by an edge then move them to storage shelves while the autofeeder and a dedicated mechanism added to the printer would take care of moving the platforms in from the feeder, locking them in place then releasing and moving the platforms with prints out to the robot pickup station.
To cut costs a system would need to be built to indirectly heat the build platforms. Otherwise a low or no force plug would need to be mounted to each of multiple heated platforms. Some cost VS benefit math there, how much are heated platforms and how many will the system be expanded to?
Use a multi-DOF robot to handle things that a rigid automation system either can’t or has to be built so as to be over sized or over complicated to handle the largest or most awkward to handle items – even though it may spend most of its time on little things – yet may still come up against things it can’t handle.
Using the robot arm just for handling the platforms with prints enables the automation to handle anything the printer can print. If the storage shelves are all spaced far enough apart to hold the tallest prints, then there won’t be any problems there.
I remember some documentary about industrial robots with one bit showing a multi-DOF arm being used just to use a long spatula to transfer some kind of baked goods around a conveyor corner. The robot was being used nowhere near its full capability – but – it had the flexibility to be moved and repurposed elsewhere in the plant and if it broke down a replacement could be quickly swapped in and the same program loaded. A custom built transfer/flip machine might cost a lot less but if the line needed to be rearranged or the thing broke down, the cost of rebuilding it or the downtime waiting on repairs would be high.
Of course the human that used to stand there swinging the spatula lost a job or was moved to another position, but the robot never needed a break and never, ever dropped any product.
I saw the photo and title and assumed the arm would be doing something like placing threded metal inserts into the printed part at just the right time. I’ve got the same printer and I know it can be set to pause printing at a defined layer. I’ve not used that feature, but I suspect it needs user interaction to start again. I’m sure the robot could hit “enter”. Can I suggest that for phase 2?
Or, how about a platform bed on a belt? Rotate the belt, have a sharp edge to peel off the printed parts, and on the bottom, a heated system to soften the plastic enough to wipe off any residue. And out in comes on the other side ready to be printed on again.
Makerbot already patented that (the Automated Build Platform). However it never worked properly so Bre pretends it no longer exists.
I don’t see an actual patent for it, but yes, of course someone would have thought of it before.
The fact that it didn’t work well for them does not mean the idea should be abandoned. That is what re-iterative engineering is for.
HaD already covered the patent. http://hackaday.com/2013/10/23/3d-printering-a-call-for-an-open-source-automated-build-platform/
Interestingly, the last paragraph is a call to action for automated build platform alternatives…and HaD editors have been ignoring Spiritplumber for over a year…
So call it a method to extend the build area instead. You can print parts longer than the build plate with a conveyor system.
Now it has a different purpose and intention than the makerbot crap.
Should I do a writeup for the broom then? I have sold about a dozen, and wasn’t making any money on them so opening it sounds good to me.
Something else I posted more than a year ago, offering to do a writeup, and was promptly ignored by HaD staff.
You can literally do this with $20.
I even managed to intercepted Mike at Maker Faire this year, showed him a $200 laser cutter that I will opensource if I can sell 50 of, he said he’d get back to me, and he never did.
Hackaday, whatever did I do to you?!?
https://www.youtube.com/watch?v=TRJRJJxBUIo Look at the upload date, please.
https://www.youtube.com/watch?v=xef6TdkXVxY
nice! What about the prints that don’t stick well to glass?
I use kapton, so I wouldn’t know. The problem is, if anything, when stuff sticks too well — which is why on the back stroke the motor is set to turn itself on and off; the idea is to avoid overstressing the gears in the plastic motor, and build up a bit of tension in the broom.
Is this it? 29 to go until you meet your goal?
That’ll be taken care of. Probably tonight.
I hope so! If anyone has a rush, I’m actually shipping units out already (the folks in Australia got them early because, well, customs and shipping time).
Anyway, as far as the 3d printer broom goes, I linked the video to the tips email explaining what it was, and said I’d do a full writeup if they were interested. Crickets. This is the third-fourth time that it happens.
The broom itself has been working for a year (I am using it to make the plastic parts for the laser in fact), but I had to replace the motor with something a bit beefier than a Tamiya clone.
Sorry HaD,
@k: there are two surefire ways to get your project(s) on this site:
1) Add an arduino, even if you don’t need it.
2) As a paid ad, HaD will post it as an article and even defend it against unhappy readers.
> 2) As a paid ad, HaD will post it as an article and even defend it against unhappy readers.
This is absolutely untrue. Do you have any idea how much cool shit I would have if we did paid ads, or taking samples for review and never returning them (coughMAKEcoughanecdotalevidencebutstillcough)? I don’t have that much cool shit.
And we know for a fact that Hackaday could pick up gigahertz scopes and spectrum analyzers for free if we did a post on them. We don’t have gigahertz scopes.
Yeah, I have never seen a flat-out advertisement here either. I only submitted the L-Cheapo because it is my intention to open the design after I sell 50 or so, like I’ve done with my older stuff.
As far as the broom goes, it’s now older than a year so I consider it openable, I just would like to know if I should do a writeup or not. It uses a Picaxe microcontroller, largely because I had a bunch of them sitting around, but could also be done with an ATTiny or similar.
Put it on the projects site. It’ll at least make a links post.
I’ve seen this kind of idea around a few times, people setting up their printer to print unattended.
Is this safe? What precautions do you take to make sure that it wont burn down your house? Do you just trust it since you have been using it for so long without problems, or do you have some kind of monitoring system that can intervene in case of emergency.
For example, if your thermistor comes off or a wire breaks mid-print and your hotend begins to heat uncontrolled. Does your firmware automatically detect this and cancel the print? Does the same happen for your heatbed? Do you have everything fused so that if there is a short or other problem with the controller or power supply it wont burn down your house?
Please let me know what extra precautions you take, or are you just risking your home/business every time you print unattended.
For me, I have no real special precautions aside from a fuse, but I never print while I’m not home and I never print while I’m asleep. This way I can check on it every half hour to hour to make sure the print is doing well.
The RAMPS firmware catches thermistor breaks — the longest I’ve run mine unattended is two days and a half, and haven’t had a problem. One thing you definitely want to do is hook up a smoke detector to a circuit breaker though.
Interesting idea. I wouldn’t mind seeing a HaD article on hooking up a smoke detector to a breaker/relay for this purpose. Although, by the time the smoke detector registers smoke it might be too late to keep your house from burning down. :-P
You don’t want a smoke detector, you want a “Heat Detector”
http://en.wikipedia.org/wiki/Heat_detector
Perhaps, but I would think that a heat detector would suffer the same problem as the smoke detector. By the time it has triggered it is too late and something is already on fire. The heat detector might also be prone to false triggering due to the heated build platform.
this is just one more reason why we need to develop close-loop software or some other form of feedback when our prints aren’t going right…so we can attach an alarm to THAT
Agreed. Another idea I was thinking about was to use a webcam to monitor the printer while away from the printer. You could set it up so that you can remotely kill power to the entire printer through some home automation stuff.
If you really wanted to get fancy, maybe you could use OpenCV to detect certain failures.
this is also a good question for safety measures when a group is using the same printer (everyone assumes someone else is watch it). In our hackerspace, we’re actively searching out answers of how to build in safety, into our equipment too.
rivercitylabs.org
https://plus.google.com/u/0/communities/104506532107430488787
Your continued thoughts on this matter are being taken under close advisement!
Email or message me and I’ll be happy to help! I am not very keen on adding content to hackaday today.