Most gadgets that interface with smartphones have a rather short lifespan and inevitably end up as E-waste. Unless hackers give them a second life, as is the case with the Romo, a little smartphone-controlled robot. [David Goeken] has successfully reverse-engineered the communication protocol to allow the Romo to controlled Raspberry Pi (or microcontroller)
The Romo was a little iPhone-controlled robot brought to market with a Kickstarter campaign back in 2013. It originally used the audio jack from the iPhone for the control interface, but was quickly followed by an updated version that used iPhone 4’s 30 pin connector and later the Lightning port. Romotive, the company behind Romo, eventually went out of business, but fortunately, they open-sourced the IOS app and the firmware. This has led to a few third-party apps currently on the app store.
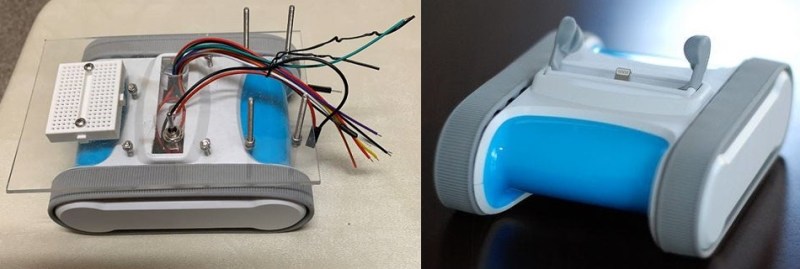
[David] wanted to use other hardware for control, so he set about reverse-engineering the protocol using the open-source software and a logic analyzer. Unsurprisingly, it uses a serial interface to send and receive commands, with two additional pins to detect the connection and wake up the Romo. After breaking out the interface header on the board, he was able to modify the Romo to mount a Raspberry Pi Zero, and power it using the internal battery.
[David] has not made his code public yet, but it sounds like he plans to. It looks like Romo’s can be a fun little experimentation platform, and they can be found for cheap on eBay. We covered another cool Romo hack back in 2014, which used a projector and vision system to create a Mariokart-like game. For a completely open-source smartphone robot, check out the OpenBot.













“Most gadgets that interface with smartphones have a rather short lifespan and inevitably end up as E-waste.”
I kind of feel that a distinction between Apple devices and everything else is appropriate here.
There’s something to be said for having Bluetooth Serial Protocol and USB-Host vs no Bluetooth Serial Protocol and some sort of proprietary connector.
Oh neat I have one of these in a box. I have to ask, why not just directly power the two H bridges inside it instead of trying to figure out the protocol?
The “reverse-engineered the communication protocol to allow the Romo to controlled Raspberry Pi” link is dead. Does anyone have a copy of that article?