High-speed photography with the camera on a fast-moving robot arm has become all the rage at red-carpet events, but this GlamBOT setup comes with a hefty price tag. To get similar visual effects on a much lower budget [Henry Kidman] built a large, very fast camera slider. As is usually the case with such projects, it’s harder than it seems.
The original GlamBOT has a full 6 degrees of freedom, but many of the shots it’s famous for are just a slightly curved path between two points. That curve adds a few zeros to the required budget, so a straight slider was deemed good enough for [Henry]’s purposes. The first remaining challenge is speed. V1 one used linear rails made from shower curtain rails, with 3D printed sliders driven by a large stepper motor via a belt. The stepper motor wasn’t powerful enough to achieve the desired acceleration, so [Henry] upgraded to a more powerful 6 hp servo motor.
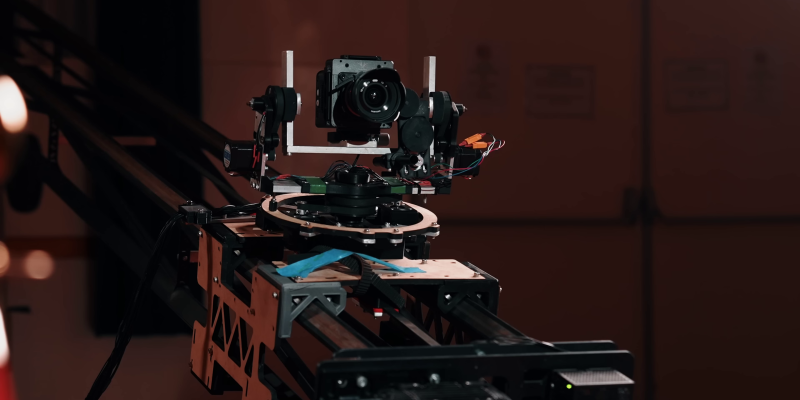
Unfortunately, the MDF and 3D-printed frame components were not rigid enough for the upgraded torque. It caused several crashes into the ends of the frame as the belt slipped and failed to stop the camera platform. The frame was rebuilt from steel, with square tubing for the rails and steel plates for the brackets. It provided the required rigidity, but the welding had warped the rails which led to a bumpy ride for the camera so he had to use active stabilization on the gimbal and camera. This project was filled with setback and challenges, but in the end the results look very promising with great slow motion shots on a mock red carpet.
We’ve seen DIY camera sliders of all shapes and sizes, including ones made from skateboard trucks and wood, and even a measuring tape.














This is my first time thinking about it, but my immediate thought would be, if the camera’s moving that fast, then it doesn’t need to be supported; you could just throw it, and rely on wires under tension to guide / catch it. Kind of like the tricks people do with diablos?
That sidesteps the big issue with robot arms, which is that the weight of hardware demands geometrically beefier hardware at each stage up the kinematic chain, until a robot for doing delicate watercolor painting ends up weighing 120kg and requiring 3-phase AC. But hardware under tension can weigh nothing.
Looking forward to the video showcasing your seven months of development leading to great success.
Seven months of development to achieve the perfect throw
Thanks for the feedback
https://en.wikipedia.org/wiki/Skycam
Sth. like that is regularly in use in football stadiums.
I like the idea of “just throw the camera,” but would the rental agency? Cable-cams popular at sports events have to deal with cable resonance, so they can’t move as fast as this GlamSlider. The industrial robots used for pro GlamBots are stiff, strong, and way expensive, but use multiple rotary joints to create a beautiful path. Each extra degree of freedom adds to the cost.
Long, precision sliders are hard to build, but our Aussie DIY filmmaker’s “one degree of freedom might be enough” still has some merit. So… how about a balanced centrifuge arm with a camera and pan-tilt unit mounted on the end? No enforced deceleration, simpler to build (*): one beefy base, one powerful motor, and one stiff, lightweight arm (think composites). Plus it still has the appeal that it’s “wicked dangerous.”
(*) Cable management is harder, plus the “moment arm” concept we learned in physics rears its ugly head if acceleration and deceleration are important.
Not quite thrown, but high speed cameras used to photograph explosive events are sometimes dropped. They are held in position magnetically inside a blast enclosure, and hundreths of a second before the event are released to free fall a few inches during the action, that way the violent shock wave doesn’t transmit through the support structure and jostle them at an inopportune moment.