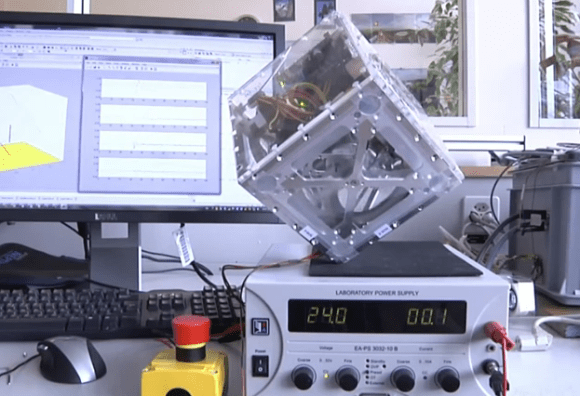
Meet Cubli, a research project which aims to make a cube that can walk around without using any appendages. It’s a research project at the Institute for Dynamic Systems and control in Switzerland. Anyone else thinking about our beloved companion cube right now?
The robotic experiments are based on angular momentum. Inside of the cube there are center mounted motors which each spin a wheel. Three of these are mounted perpendicular to each other to give the cube the ability to change its position along any axis. This is best shown by the first video after the break where just a single side of the assembly is demonstrated. A square frame starts at a rest position. You see the wheel spin up and it is suddenly stopped, which causes the momentum of the wheel to pop the square frame up onto one corner. The wheel then switches into a second mode to keep it balancing there. The final mode is a controlled fall. This theoretically will let the cube move around by falling end over end. So far they’re not showing off that ability, but the second demo video does show the assembled cube balancing on one corner.















It’s really an awesome project but I can’t see an application for but that hasn’t stopped me from doing projects because “I can”. Maybe an amusement park ride, obviously on a bigger scale. Any takers for an application for this?
Many of these seemingly useless projects turn up algorithms and physics understanding that can be applied in more useful fields.
Take the ping-pong-playing quadcopters, those are pretty much useless but the research is aimed at making autonomous vehicles with near-instant reaction to the environment.
Put it inside a basketball and you can always spin one on your finger like a pro.
The obvious application is for propellantless directional control of cubesats. It’s the same principle used to aim the Hubble or the international space station.
The problem in reaction wheels is that you need to unload it regularly. You can spin it up to stop satellite rotating, but you can’t spin it down because the breaking force to the wheel will be converted to original spin again. Got spin -> use wheels -> fire thrusters -> stop wheels. But thrusters on CubeSats are difficult because they are small and gases and fuels are not allowed on most(if not all) piggyback launches. There are alternatives like magnetorquers or aerodynamic tethers. I don’t know how much of CubeSats have 3-axis stabilization, but I believe there aren’t many.
The same concept is considered for exploration of low gravity bodies, see e.g. http://youtu.be/g_wNpnkbqpQ?t=25m20s
(it’s a long talk, but I positioned it at the point where he explains the principle).
This reminds me of the evil cube robots from Terrahawks. Life immitates art
Oh, I see an application: A new ultra expensive must have levitating clock.
Want.
This will probably benefit from scaling down, there’s a sweet point somewhere where you can run it off internal batteries.
The folks at symbrion.eu should have thought about this approach.
Batteries would be rather heavy.. .so something along the lines of using cells positioned as a flywheel, and have brush connectors to transfer the power might be better than having both a flywheel wight and a battery weight.
I’d guess that’s bad for the chemistry. Or the internal structure of the cells. There’s a lot of G in a wheel spinning fast enough to have an effect. That, and you wouldn’t want battery packs slipping off and flying round the room at people.
but a flywheel to the face is always welcome…
i think the bigger problem is to get the same angular momentum you either have to spin fast which could potentially cause an issue since your “flyweels” wouldnt have an even mass distribution potentially causing wobble. You could slow it but you’d add significant weight. I know there is a similar project at the UCSD Robotics lab using 4 CMGs for locomotion and i think they are using a bunch of batteries that are opposite of eachother to keep the weight as uniform as possible.
could do away with the brush contacts for power if the motor+driver was mounted on the flywheel itself, and the axel went to the main body
each fly wheel would be a motor with its own battery, with the axel just mounted to the central frame, leaving low-power control signals over the brushes
I love the big red emergency button… just in case the cube goes rogue and tries to kill everyone in the lab.
if the cube drops down on the big red emergency button, does it count a robotic suïcide?
This is certainly interesting but it doesn’t strike me as the most efficient way of moving about. Sort of like when Mythbusters fitted square wheels on a vehicle, yes it’s it interesting, fun even but not terribly useful for driving around.
I was excited for a short moment.. I thought it was a CubeSAT
It basiclly is one, well the start of one, these could be used as reaction wheels in space.
Hmmm….
I thought that looked like the cubsat skeleton.
I think it is a cubesat skeleton. I worked on Phonesat and the holes etc are in the right places
Yes scaling down is the Key but didnt any one notice you can build that easily with a few Old Hardrives??? ……Hackers Start Your engines/…..cubes?
Also Glad there not using spheres…..Phantasm any one ? (the movie)
surely you mean the 80’s Gerry Anderson kids TV series Terrahawks ;-)
Matlab FTW!
Those are some amazingly quiet motors.
Anyone seen the old movie Demon Seed? Forgot about it until I saw this!
Your Companion Cube cannot accompany you through the rest of the test. If it could talk – and the Enrichment Center takes this opportunity to remind you that it cannot – it would tell you to go on without it, because it would rather die in a fire than become a burden to you.
I’d rubberise the edges and just let it go nuts.
Anyone have any idea what motors he’s using?
That’s not how the flywheels work in space by the way. They are tilted perpendicular to their axis and the gyroscopic effect causes a change in angle that way. The technique shown here requires a solid base to spin the wheel up against to start with.
http://en.wikipedia.org/wiki/Control_moment_gyroscope
Am I the only one who thought of this before anything else?
http://en.wikipedia.org/wiki/Marching_cubes
If it were more needlessly complex, would it be a cube goldberg device?