Drawing is difficult for a lot of people… So, why not build a robot to do it for you? [Darcy] had an idea for a rather unique drawing robot — he calls it the Isoscel-Ease.
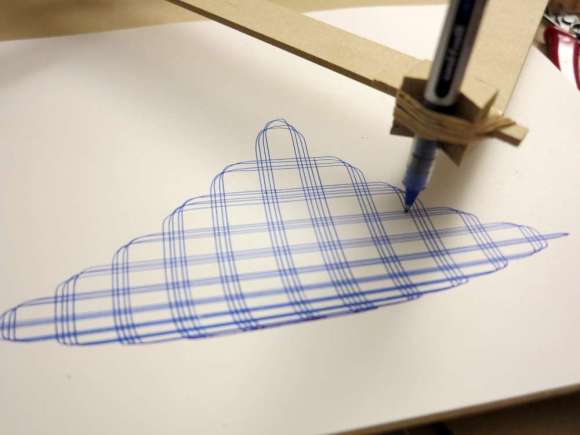
Instead of using a boring XY gantry, a deltabot, or using a scissor linkage (actually that one is pretty cool!), [Darcy] decided to try harnessing of the power of triangle geometry! As you can probably guess, the linkage forms an isosceles triangle, hence the name. A pair of stepper motors increases and decreases the odd side of the triangle, allowing for a full range of continuous inky movement (there’s no pen actuator) over the page.
It’s a very cool little drawing robot, and it was completely designed in SketchUp — He has lots of photos of the build process and example drawings on his site — But don’t forget to stick around after the break to see a video of it in action!
For another unique drawing robot, who could forget the robotic Etch-a-Sketch?















Great robot. Seems to be accurate and isn’t to bulky.
I would have perferred Isoscel-Easel.
neat idea I’d like to see the math on the dimensions of the track and arms compared to the print area also might make an interesting portable desktop cnc machine
Shouldn’t be too hard for a good approximation:
Let’s say our print area is x by y with x being the edge the gantry is on. To reach the far edge of the print area (the side furthest from the gantry) each arm will need to cover the distance y. This means that when teaching the nearest edge (to the gantry) you have to move both arms in opposite directions down the gantry, i.e. they need 2y of track. Now, when trying to reach each corner nearest the gantry, the arms will hang out y further meaning the track length will need to be 2y+x. What this shows is that you firstly want to put the gantry track against the longest edge but you will still need additional track to accommodate the arm’s reach when against the gantry.
The biggest hurdle I can see is lifting the head as either:
– the head needs to test against the surface all the time (and lift the business end) which may be fine for printing, or
– the frame & arms needs to be super rigid to support a floating head (that could be some distance from the gantry) which is going to be hard to minimise any give.
Gah. fscking auto-correct.
s/teaching/reaching/
s/test/rest/
Fun project. RepRap Tuga is almost the same but for 3D printing. Check it out. http://youtu.be/VRkYpnTxO_M
I’ve made a very simple drawbot using Lego Mindstorms.
http://www.instructables.com/id/Building-a-Drawbot-with-LEGO/