If you grew up playing with LOGO on an old 8-bit computer, you’re probably familiar with the concept of a drawbot. It’s a simple robot that drags a pen around to draw on paper. [Tim] decided to build one that uses a simple skid-steer design to get around the page.
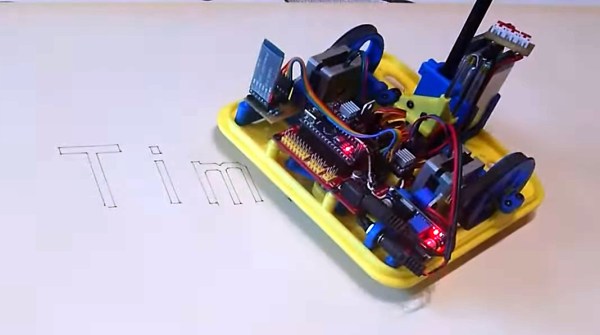
An Arduino Nano is the brains of the operation, paired with a CNC Shield that allows it to drive a pair of stepper motors. The stepper motors drive the wheels via cogged belts, with the 3D-printed rims fitted with square rubber drive belts used as tires for additional grip. A third jockey wheel is used for balance, in addition to the two main driven wheels. A servo is used to raise and lower the pen as needed. All the hardware is mounted on to a simple tray chassis, which was 3D printed along with most of the other basic componentry.
The robot does a good job of plotting out a drawing on a small scale, with [Tim] using it to outline his name on paper. We’ve featured some other great drawbots before, too, including this nifty spray-can version. Video after the break.