 The early 3D printers of the 80s and 90s started off as cartesian bots, and this is what the RepRap project took a cue from for the earliest open source 3D printer designs. A bit later, the delta bot came on the scene, but this was merely a different way to move a toolhead around build plate. We haven’t really seen a true polar coordinate 3D printer, except for [Tyler Anderson]’s incredible Theta printer.
The early 3D printers of the 80s and 90s started off as cartesian bots, and this is what the RepRap project took a cue from for the earliest open source 3D printer designs. A bit later, the delta bot came on the scene, but this was merely a different way to move a toolhead around build plate. We haven’t really seen a true polar coordinate 3D printer, except for [Tyler Anderson]’s incredible Theta printer.
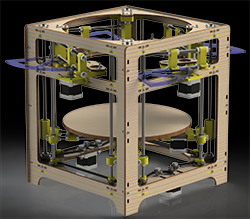
[Tyler]’s theta printer is designed to print in as many different materials as possible, without the reduction in build volume that comes with multiple toolheads on more traditional printers. It will be able to lay down different colors of plastic in a huge build volume, and even some of the weirder filaments out there, all in a single print.
The theta printer is based on a polar coordinate system, meaning instead of moving a hot end around in the X and Y axes, the build plate rotates in a circle, and the extruders move along the radius of the circle. This spinning, polar coordinate printer is the best way we’ve seen to put multiple extruders on a printer, and has the added bonus of being a great platform for a 3D scanner as well.
With four extruders, four motors to control the position of each extruder, a rotation motor, and the Z axis (that’s 10 steppers if you’re counting), this is very likely the greatest number of motors ever put in a 3D printer. Most electronics boards don’t support that many stepper drivers, and the one that will won’t be ready for the end of The Hackaday Prize. Right now, [Tyler] is running a fairly standard RAMPS board, running two extruders and R axes in parallel. Still, it’s good enough for a proof of concept.
One interesting aspect of [Tyler]’s design is something even he might not have realized yet: with a single bed and four extruders, he’s effectively made a 3D printer geared for high-volume production; simply by printing the same part with all the extruders, he’s able to quadruple the output of a 3D printer with the same floor space as a normal one. This may not sound like much, but when you realize Lulzbot has a bot farm producing all their parts, the Theta printer starts to look like a very, very good idea.
Videos of [Tyler]’s Theta below.
 The project featured in this post is a semifinalist in The Hackaday Prize.
The project featured in this post is a semifinalist in The Hackaday Prize.















I love it. It looks like it’d be so easy to go closed loop control on each of the axises too making it much more repeatable than most other repraps. I may have to try to build one myself soon just to have a better printer.
My concern would be the variable movement tolerances. A 0.5 degree step moves the bed approximately 0.9mm at a radius of 100mm, and 1.75mm at 200mm radius. Surely to counter that you’re either going to have a very slow rotating base due to gearing to get enough steps, which would add slop, or poor resolution towards the outside of the bed.
That’s a very good point, one I hadn’t thought of.
Upon hearing about this polar coordinate printer configuration, I thought it might be something less complicated to build, essentially removing some of the alignment needs that are intrinsic to a standard Cartesian coordinate printer. While such a platform does require more programming, and you still need to align the bed, the linear mechanism for the extruder carriage, and the linear mechanism for the z-axis – it still sounded like a bit less work.
Your point, though, brings to light that the programming for such a printer might carry pitfalls and be much more extensive than I first thought…
If belt with pulley were used instead of gears as you suggested it would eliminate the slop..
Actually, the combination of both radii (tool head sector and turntable) may somewhat equalize offset errors, although the orientation of the error would vary with distance from the center.
This is correct. As it stands, the printer is designed to match the resolution of a RepRap near the outer perimeter. As you move towards the center, the resolution improves but the speed drops. The exact center of the platter is a singularity, in the true mathematical sense. Part of the speed loss is made up for by the fact that the rotating platter has less inertia than one moving linearly.
Aldan has a good idea with using a belt. There is noticeable backlash in the gears. Also the laser cutter didn’t do a very good job making the big gear perfectly circular. I’m guessing the radius varies by a good 1 mm. This means it meshes tightly at some points and very loosely at others.
My favorite design for polar coordinate cnc printers uses only two motors: one to move the head along the radius, and the other to spin the table. But the table is on a screw thread, such that a 360 degree rotation == 1 step up or down in Z. Couldn’t be much simpler than that!
I fear the the first layers will be problematic.
The distance of the printer head to the bed will increase when the bed turns down. This will settle after some layers of plastic, but for the first round you’d have to adjust the filament throughput to the distance to the bed in order to get a constant distance for the following layers.
And this only works for additive production methods.
You cannot construct this as a mill, as it would be impossible to create “holes”.
A minor change to this setup presents a novel concept for subtractive manufacturing, using only rotational actuation on four axes, with three being active and the last two (tool elevation and tool pitch) mutually constrained.
Think record player, including the arm pickup, and keeping the needle perpendicular to the table.
There is already 10 stepper controlling system – BeBoPr++ (BeagleBone Black cape) with Decamux and two Pepper boards with Machinekit (LinuxCNC).
You can’t print 4 identical objects at the same time, because they would be on different radii, and thus would end up being different in size. You could print 2 though, each with 2 different fillaments.
I’d worry not just about the possibly poor resolution at the outer edge, but also about the area very close to the center; printing a straight line through the center at a constant speed would require an instantaneous 180 degree turn of the build platform.
Why would they be on different radii? Each extruder head is independently controlled.
You can build as many at the same time as you want (when still fitting) by adding them to the build volume in a rotational symmetric way.
Of course, they won’t have maximum accuracy because none can be in the middle.
A simpler execution of the same basic idea: https://www.youtube.com/watch?v=hrrSHVrNXc4
Some of the early RepRap prototypes were made from Meccano and used glue gun glue on a polar system like this.
Its a nice execution of a 9 year old idea! For anyone interested in reprap the complete development blog history is a good read http://garyhodgson.com/reprap/2012/02/a-history-of-reprap-development/
Using the turntable on a screw so you got Z and R from one motor sounds like a good idea for a dirt cheap reprap, though obviously the layers accuracy would be +/- thread pitch.
Accuracy wouldn’t be +/- pitch if you used a spiral vase mode approach. The layers would end up being oriented along the pitch line but just as fine as you would like them. Might require some modded slicer math
Good point, apart from the whole steps/revolution thing, I guess you’d get better results building near the circumference rather than across the middle though. But thinking about it I guess only the first layer would be non uniform thickness, so the total z accuracy of your part would be +/- pitch.
The innovation isn’t using the rotating platform and arm, the innovation is in realizing that you can make multiple arms around the single platform, and use that to do multiple materials, or to speed printing. The software is the really hard part, though. For example, if you’re printing one thing with four extruders to print 4x as fast, the slicer would need to know how to coordinate everything so that the heads are all moving on coordinates with the same platform rotation, and the extruders don’t hit each other, which is pretty tricky.
For printing the same thing multiple times, it’s easier. Similar to Sailfish’s “ditto print” feature, you’d slice and print the object once, and send the identical instructions to all extruders, so they’d be in lock-step. This works really well for cranking out quantities of small objects on a dual extruder printer, and with this printer you could print four at once, and each of the four could be much larger.
That being said, in terms of throughput I’m not sure that you’re much better having one of these printers with four extruders vs. four single-extruder printers – how much do you save sharing the case and build platform?
The other aspect that’s appealing to me is that for multi-material printing the ‘idle’ extruders could move away from the build platform entirely, onto a ‘shelf’ so that the nozzle can’t drool. That would solve the biggest problem that multi-extruder setups have currently.
I totally love how so many extruders can work together without compromising how it prints.