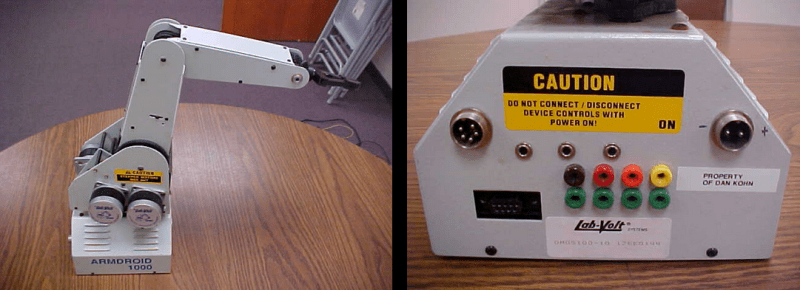
Not too many people will argue that Robot Arms aren’t cool. [Dan] thinks they are cool and purchased a LabVolt Armdroid robotic arm on eBay for a mere $150. Unfortunately, he did not get the power supply or the control unit. To most, this would a serious hurdle to overcome, but not for [Dan]. He opened up the robot and started probing around the circuit board to figure out what was going on.
Since there was a DB9 connector on the outside of the robot arm, he assumed it was a standard RS-232 controlled device. Good thing he checked the internal circuitry because this was not the case at all. There was no mircocontroller or microprocessor found inside. [Dan] painstakingly reversed engineered the circuit board and documented his results. He found that there were SN76537A chips that drove the 6 unipolar stepper motors and SN75HC259 latches to address each individual motor.
Now knowing how the robot works, [Dan] had to figure out how to control the robot from his computer. He started by making a custom Parallel Port to DB9 cable to connect the computer to the arm. After a series of several programs, starting with simply moving just one arm joint, the latest iteration allows manual control of all joints using the computer keyboard. A big ‘Thanks’ goes out to [Dan] for all his work and documentation.














On Oct 16, 2006, I purchased…
gee, I’d love to contribute some of my robot control code, but as teh last post was in 2009, I’m gonna guess its prolly not an active project anymore.
I’m surprised that there’s not a good manual for that arm, it looksl ike a training arm.
Cool project, even if the last update was 2009. Dave from buldyouridea.com seems to also be reverse engineering an even more complicated robot arm. http://www.buildyouridea.com/cnc/scara3d/scara3d.html
Cool project, but this is a really old LabVolt robotic arm without much power and precision, they’ve been using servo motors instead of steppers for like 10 years. I worked for them 5 years ago and the were trashing one, so I brought it home. I never got to make a full servo controller from scratch though.
DE9. DB is the size of the 25 pin, 13WC and others.
The original Armdroid was fully documented (schematics) in two issues of the UK electronics magazine Electronics Today International (ETI). I have them at home. Someone at the Bristol Hackspace has an Armdroid, although it’s painted orange, not white. Maybe this is an updated version? It has different stepper motors, too.
I have an ESHED SCORBOT-ER-IV with a linear axis at home I’ve been needing to build a controller for awhile.
I got it pretty cheap because it didn’t come with a controller. But I think I could come up with something better than the original, so no worries there.
The arm is gear motors with optical encoders and belt driven, looks like the one above is belt driven too, but with steppers obviously and it’s smaller.
The scorebot should be pretty easy to interface with just being DC motors. I’ll probably have a dedicated PIC based PWM motor controller / pulse counter / limit switch board for each axis and just have the computer send a command for end position and speed to get there, and then watch for faults and command complete type stuff.
The wrist and gripper are tied together I think, which may be a little tricky. I think there are one way bearings at play maybe. It’s been a while since I’ve messed with it.
Never enough time!
We saved once a traning robot arm like that from the dumpster in the University. It was powered by a Z80.
The idea was to reverse engineering it… but we got bored…
It’s still there, inside some cabinet.
Do you have an operation manual or a copy for the Lab Volt DM-5100 control box and pendant instructions? We need this for our robotics class I teach for kids. We have the arm and other accessories but no manual to get the arm working, can you help?