One day while at our poor, poor Radio Shack, [davidhend] purchased a little 6-legged walking robot. It came with an infrared remote that allowed a user to control its movements from afar. After a few minutes of making the robot walk around [davidhend] got bored and decided it would be a great toy to hack.
His plan was to make the robot autonomous and able to avoid obstacles. To start off, the robot was taken apart enough to expose the circuit board. There he found a ST1155A bi-directional motor driver that was controlled by an on-board microcontroller. After checking out the ST1155A data sheet, [davidhend] thought he would be able to drive it with an Arduino. So, out came the soldering iron and all the unnecessary components were removed from the original circuit board.
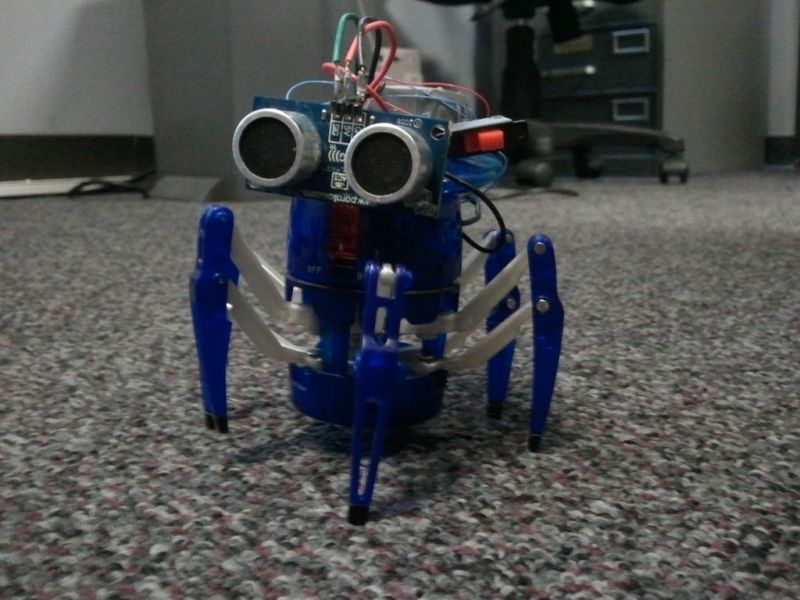
An off the shelf PING))) sensor was mounted on the front of the robot and is responsible for detecting obstacles. That information is then sent back to the Arduino Nano which controls the motor driver to make the robot back up, turn and then start walking straight again until another obstacle is detected. [davidhend] made his Arduino Code (.zip file) available to anyone who wants to make a similar project. Check out the video after the break!
Oh, and if you plan to run down to the Shack to pick up a robot of your own you better do it like right now.














SO CUTE
It’s so adorable!
openworm on this – would be fun to watch
I’d like to mention that these robots are a possible unauthorized clone of a design by jamie mantzel, not that I believe he holds any patents on it. It’s a very interesting system; the rotation of the head unit determines in which direction the legs walk the robot.