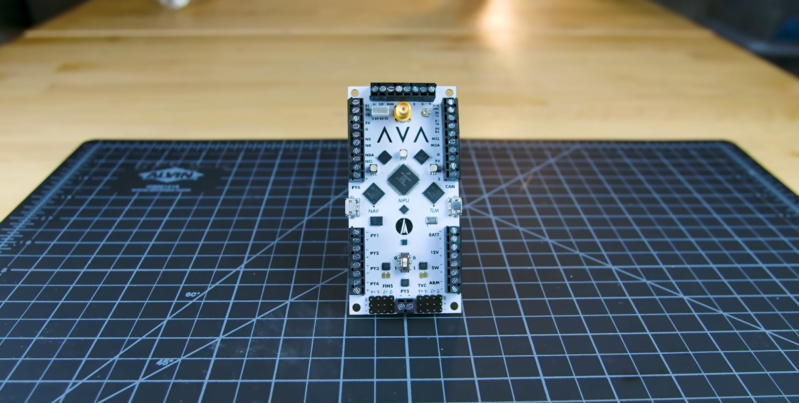
When you’re building and launching a variety of advanced model rockets like [Joe Barnard], you don’t want to spend time building (and debugging) specialized flight computers for every rocket configuration. This challenge has led him to create AVA (All Vehicle Avionics), an impressive model rocket flight computer that he intends to use on all his future rockets.
All of [Joe]’s rockets feature active stabilization and guidance, and comprehensive telemetry using a variety of sensors. On the board there are three separate microcontrollers connected over I2C or SPI, each with its own micro USB port. The two smaller microcontrollers are both ATSAMD21s, also used on the Arduino Zero. The first is used for GPS and inertial navigation, and uses data from onboard and external sensors like the two IMUs (one is a backup), GPS and barometer to estimate the rocket’s position, velocity and attitude, The second is for telemetry, and it handles all external communications via a Bluetooth modem or long range 900 Mhz radio. The main processor (MPU) is a NXP MK20DX256 (also used on the Teensy 3.2), which receives data from the other microcontrollers and handles all the real-time operations and control outputs.
[Joe] gives a very detailed overview on the board, it’s capabilities, and the reasoning behind some of his design choices in the video after the break. Most of the sensors and microcontrollers were selected partly because of his experience with them. All three microcontrollers have Arduino bootloaders, also due to familiarity with the framework. AVA is the 12th in the line of flight computers [Joe] has built, and it is clear that a lot of work and hard-earned experience went into the design.[Joe]’s videos are incredibly information dense, but still entertaining, and it is mind-blowing how far he has come in the past few years. AVA is part of a larger project, where [Joe] will attempt to land one of his rockets vertically. We’ve already covered another part of the project, an upgraded launchpad. He has also experimented with a silo launched rocket named THOOMP.














Commercial GPS receivers conform to COCOM limit, (altitude < 18km) and (speed < 515m/sec) cannot be simultaneously exceeded, either can be exceeded, for prevention of use in missile or ICBM
He mentions that in the video and says that’s not important for his flight regimes. Also, he said he doesn’t plan to sell these except to a very limited number of people involved in his experiments so, unfortunately, other than an interesting effort, this hardware is of no use to anyone but him and those few.
So how can I bye it because i’m making a model rocket so I need a flight computer like AVA or can you make me a AVA.thank you.
O well If you need to talk and help me go to my youtube to tell me
As a fellow high-power rocketnut (Level 3 Tripoli certified) for over 25 years, the advances in rocket-related electronics never cease to amaze and impress me. When I started, most HP rocketeers used motor ejection (a delay charge ignited after burnout, which ignites the ejection charge after a specific time) or a primitive electronic timer to deploy the chute. The first accelerometer-based altimeter/deployment device was about 20-25 cm long and 3 cm wide, and cost about $200 (1996 dollars!). I destroyed two of these units… :-(
Looks like a lot of forethought and work went into AVA. I admit that I skimmed through the video, and as a non-engineer most of the technical talk went way over my head. But what does AVA do (that would be useful to dumb non-engineers like me) that commercial altimeters don’t do? There are a number of commercial units that continuously measure altitude and acceleration, deploy chutes at apogee and at a pre-set lower altitude, connect via Bluetooth, determine continuity of ejection charges, etc. For example, Eggtimer’s GPS-flight computer kit does all these things and more. What advantages/capabilities (that I would probably find useful) does AVA have over that unit?
And one suggestion: if you go commercial, can you shrink AVA down, or at least decrease the width so as to fit in a smaller tube? It looks like there’s a fair bit of unused space on the board.
“what does AVA do (that would be useful to dumb non-engineers like me) that commercial altimeters don’t do?”
Just one aspect – it controls the gimbaled thrust vector control. It’s amazing to see Joe’s rockets correcting their own flight paths when they veer.
The big difference is that [Joe’s] rockets are actively stabilized and guided, with a thrust vectoring motor mount and a reaction wheel, and a full inertial navigation system. There is no guide rod to keep it pointed up during launch, the rockets do it all on their own, and they can conduct in-flight maneuvers.
SAY that more simple
It steers.
Looks great! I imagine an RTK GPS would help, with centimeter accuracy you could do some very precise landings, and maybe some sensor fusion with the 9-dof.
Joe is the coolest mini Elon online. Check out Joe B’s YouTube channel.
Any of the electronics better than commercial grade? I can forsee a G induced failure causing interesting effects
Commercial grade components launched day in day out on cubesats, usually tested to NASA GEVs and above with very few problems.
What’s most annoying about this is that it’s borderline impossible to do in the UK as any form of guidance added to a model rocket classifies it as guided missile, and that comes with some very very hefty penalties.
Old guy (me) sees young guy soldering small pitch SMT with bare eyes, turns away in envy and disgust. At least this particular youth is not wasted on these young.
other irrelevance:
wife – why do you want to build another rocket?
nephew & niece – when can we build another rocket?
cat – I moved this rocket stuff off of my bench. why do you keep putting this crap here?
dog – I am bored. stop working. can we play? can we eat some more?
My phone is filled with commercial grade components, I’ve dropped it on the floor many times now, with no damage or loss of functionality, probably exceeding 1000 gs on occasion, way beyond the g forces you will see from a model rocket engine.
How do you build this?