
If you want to get better at your favorite sport, there’s really no substitute to putting in more training hours. For solo activities like running or cycling that’s simple enough: the only limit to your training time is your own endurance. But if you’re into games that require a partner, their availability is another limiting factor. So what’s a badminton enthusiast like [Peter Sinclair] to do, when they don’t have a club nearby? Build a badminton training robot, of course.
Automatic shuttlecock launchers are available commercially, but [Peter] found them very expensive and difficult to use. So he set himself a target to design a 3D-printable, low-cost, safe machine that would still be of real use in badminton training. After studying an apparently defunct open-source shuttle launcher called Baddy, he came up with the basic design: a vertical shuttle magazine, a loading mechanism to extract one shuttle at a time and position it for launch, and two wheels spinning at high speed to launch the shuttle forward. Video after the break.
 Getting all the details right took a few iterations, as [Peter] describes in detail on his Hackaday.io page. The motors are powerful brushless DC ones normally used for drones, which can spin at up to 7000 rpm. They grip the shuttle’s head using two molded urethane wheels that are flexible enough to provide a good grip, but strong enough to last for a long time. All other parts of the machine are 3D printed for maximum flexibility and ease of manufacturing. Several servos enable the launcher to pan and tilt far enough to reach every corner of a standard badminton court.
Getting all the details right took a few iterations, as [Peter] describes in detail on his Hackaday.io page. The motors are powerful brushless DC ones normally used for drones, which can spin at up to 7000 rpm. They grip the shuttle’s head using two molded urethane wheels that are flexible enough to provide a good grip, but strong enough to last for a long time. All other parts of the machine are 3D printed for maximum flexibility and ease of manufacturing. Several servos enable the launcher to pan and tilt far enough to reach every corner of a standard badminton court.
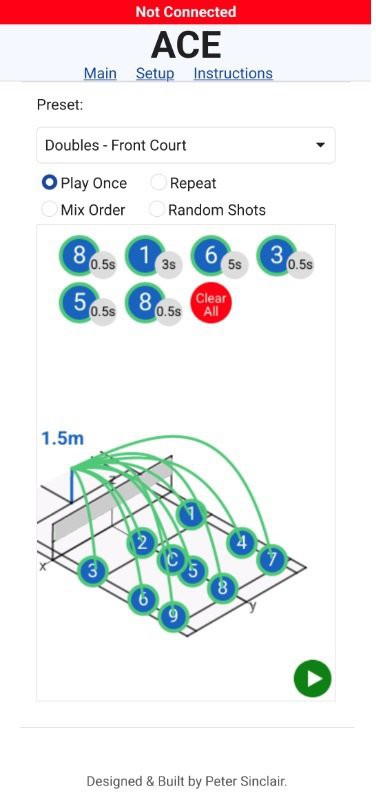
An ESP32 is used to control all functions. [Peter] didn’t want the added complexity of having to maintain a mobile app, so he built the entire user interface into a local web page served up through the ESP32’s WiFi connection. The user can select a wide variety of training programs and also calibrate the launcher to account for variations in shuttle types or the size of their training area.
Safety was a factor [Peter] considered throughout the design. The launcher includes a proximity sensor that will stop the mechanism if a person is standing too close, and moving parts are covered as much as possible to make the machine safe to touch. All design files and code are available on [Peter]’s GitHub page, hopefully enabling more badminton fans to enhance their training programs. This machine might also come in handy to fine-tune another badminton robot that can return your serve.
















Until I read “badminton”, I was thinking about an entirely different “shuttle launch”.
B^)
They were probably worried that including “cock” in the title would trigger peoples’ spam filters, or invasive work/school censorship software. The latter is why my students didn’t have access to dirtypcbs.com.
Next, pickleball!
Does it work with feather birds, or only with nylon?
This sounds like something Linus over at LTT would be interested in…
Would you produce wheels as my clubs Baddy machines need (6) to be replaced
Hey Andrew, For the Baddy wheels you can email me. at
shuttlebro.help@gmail.com