We love it when this happens. Sometimes we post about cool technology that companies are developing which might start an outcry of “not a hack” — but then, just sometimes, it still inspires a few readers. [Jeroen Domburg] — who everyone knows as [Sprite_TM] and is a judge for The Hackaday Prize] — saw a recent video about micro robots, a project funded by DARPA, and decided to try making his own.
We shared the original story a few months ago about these replicator like micro-robots, which can quite literally swarm over surfaces, use tools, and manufacture micro-sized parts. The robots themselves are actually just dumb little magnets — the magic is in the surface underneath them.
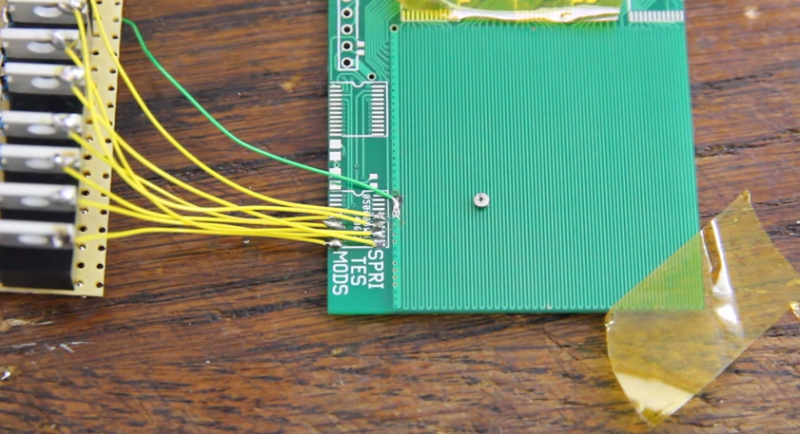
This sparked an interest in several people, and [Mike] made a very simple version of it, capable of 1-dimensional movement. This inspired [Sprite_TM] to step it up a notch, with his own 2-dimensional version. He’s designed his own PCB that allows him to run current in various directions through the traces of the board — this effectively allows him to control a small neodymium magnet to go whichever way he wants.
It’s a fascinating experiment and he has well documented it on his site, as well as posting a few videos of the various prototypes along the way:
Impressive work [Sprite_TM]!














Nice hack! He’s done the hard work for us finding out several things that don’t work. :)
It’s a pity the original app uses fancy diamagnetic material. Anyone know where we can get some?
you can get pieces of diamagentic stuff from ebay.
Wonder if you could avoid the diamagnetic material by using a bunch of small vias to make an air-hockey table. Loved the pile of burnt boards too :)
If I’m honest I’ve not read the writeup or watched the vids yet , but bismuts (shotgun shot) and graphite (pyrolithic graphite) are both diamagnetic , readily available and cheap.
I’ve seen websites sell pyrolithic graphite, and it’s NOT cheap. Unless the sites I saw are ripoffs, and it’s the same stuff they sell as barbecue fuel.
https://www.scitoyscatalog.com/category/M.html
Levitation bundle #3 16USD for 2 pieces and some nice magnets…
It’s pyrolytic graphite. It has low friction and is diamagnetic. It also has very high thermal conductivity (in one axis) so it helps keep the PC traces cool.
I’m gonna try and integrate this into my model railway, imagine the possibilities!
Imagine that you urinate on this PCB and tiny robot follows the point where stream of your urine meets the board. How hard can it be?
…
……..
Not too hard, or else the stream tends to break up and spray everywhere.
Even simpler DIY:
https://www.facebook.com/photo.php?v=663668140355268&set=vb.568708856517864&type=2&theater
Come on, Facebook link ? You got to be kidding me !
Really! How dare you to link to content hosted by a for-profit corporation! At least have the decency to link to content hosted by a different for-profit corporation!
Exactly !
I’d consider clicking it if the link had some form of description in it. I don’t like clicking facebook links or youtube links because I never know is it’s just some clickbait thing to generate ad revenue for something unrelated.
Notice how with the two magnets he only uses two coils to act like a 2 phase stepping motor instead of individual trace control. This means a person can use a 2 phase stepper motor controller. Its probably closer to the origional ‘robots’ post as they seemed to break everything into particular areas of movement. Did anyone mention how much current is being used in these?
This is what hacking should be about. Many people say they do it to learn or better the world.
I firmly believe that it’s actually just about one-upping everyone else and showing them how it can be done… better.
you know what really annoys the hell out of me? youtube videos that don’t have a full screen button. this simple feature totally makes me not even bother with coming back here and i’ve been a loyal follower since 2006. I hate to bring this up on this hack, but I literally cannot stand it.
The line must be drawn here…this far, no further!
seriously, bring back the fullscreen buttons.
oh yea, neat hack.
actually it’s working just fine here .. :\\
Or you could, you know, click the “Watch on YouTube” button where your beloved fullscreen button is returned :-)
Oh, the hack? I agree, very nice indeed.
I could just, you know, get all my hacks from YouTube from now on too but, you know whatever. *shrug*.
I shouldn’t have to go to YouTube to watch a video that’s obviously been embedded for my enjoyment here. Furthermore I would think the staff at hack-a-day would want to keep users on their site, cause god knows once a user finds their way off your site and on YouTube they’re never coming back. I mean why would you, there’s 20 other videos that are completely relevant to my interests!
That’s just on embedded videos iirc, view it on youtube itself and get full screen, speed up/slow down and whatever else you want.
The lack of a fullscreen button is a result of your browser doing Youtubes in HTML5. We have nothing to do with it.
Weird since it works in every other site but this one. But whatever. Thanks for trying.
Looks like if you add a couple parameters to the embed code then you could enable the full screen button again. See: https://productforums.google.com/forum/?hl=en#!searchin/youtube/embedded$20fullscreen/youtube/I_9GA9toPzI/L3QGrhlyksMJ
If you want one of the pcbs to try this yourself but you can’t or don’t want to make one or buy one… Open up an old usb drawing pad (The ones that come with a battery operated “pen” and often a little wireless mouse) they are reasonably cheap and have virtually the same board layout. I had a go a little while back, when I first read about this, it seems to work, although they are the spacing is a little wider so you have to play with the pulses a little.
Protip: you can often find them, sans pen, for a couple dollars in thrift stores. The pen is the expensive part.
Ahh just had an Idea .. Have any of you seen the EL Display and EL Display Ink ? Well somehow make that magnetic or Instead Get a Ultra sonic Levitation Thing ..Sorry I forgot the name is it a Transponder ? .. Well if you can do that and Shoot Directed Microwave Energy without Interfering with the Ultrasonic Field ..If it works .. Well You have just created your Own State of the Arc “4d” or 3d display Just hook the transponder to a Aurduino That Tunes and changes the Ultrasonic Frequency’s & the Metal or glass around it ..Etc..Hoping the Display will look Like Those Plasma Ball Lamp Things , Hell you could even make a 3d Printer Like this .. Just some Idea i was Fantasizing about , Also if you can combined magnetic + Ultrasonic into the Levitation Concept you can Your robot levitate at high distances and somehow sometime turn it into a drone .. But you will need a Nano Robotic Microscope & Soldering Needle To Make your Bot,
I wonder if he covers the pcb with something like kapton it will move smoother.
This is a great hack. I wonder what the implications of this technology are. Can a trace design even more sophisticated cause a magnet rotation?
Nevermind…helps if I see the original video: http://spritesmods.com/?art=magnmicrobots
Its amazing Sprite_tm is the best! He can hack everything that he see!!
Ok I think I already was but now I’m officially a fan of this guy
Would be cool to combine with some liquid nitrogen. Solves the friction problem too =)
Is this really considered a micro robot though? Even when DARPA or whoever did, it seemed dubious to call it a robot since it’s really just a little magnetic puck travelling on a circuit. It’s an impressive build and I’m not cutting it down, just curious about the wording.
You could consider the whole assembly to be the robot, including the board – the magnets are just end-effectors for that robot
Just Imagine A Coil Gun That uses this Instead of A Straight Forward Firing Barrel Concept.. It can go in any Direction Levitate towards the Target
Soon controlling miniature F1 race cars … https://www.youtube.com/watch?v=xPUEOhMBpUw