The team behind the Femtoduino – an extraordinarily small repackaging of the Arduino – sent in a few videos from YouTuber [phineasIV], a.k.a. [Eric] that shows one of the smallest multicopters we’ve ever seen.
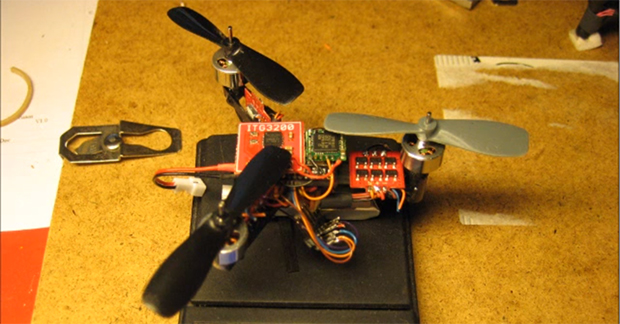
Because this isn’t a traditional quad or hexcopter, the control system is a little weird. Two of the motors and props are fixed along the vertical axis, while the rear prop is connected to a small servo to rotate from side to side. Still, the electronics are fairly standard for any multi rotor vehicle – a triple-axis gyro provides the stability of the vehicle coupled with MultiWii, while an amazingly small servo receiver, Bluetooth module,, Femtoduino, and a trio of brushless ESCs tie everything together.
The end result is a tri-copter that weighs about the same as the Crazyflie Nano Quadcopter, but is just a bit smaller. As impressive as it is on video (seen below), we’d love to see this tiny robotic hummingbird in person.
[youtube=http://www.youtube.com/watch?v=r1pavL3uvTw&w=580]
[youtube=http://www.youtube.com/watch?v=JbXyk6UADBs&w=580]
[youtube=http://www.youtube.com/watch?v=oacVziO6ie4&w=580]














Make a bundle and sell it !
The Bluetooth module for PID tuning is a clever idea! Maybe implement battery-voltage measurement into it.
Damn, it amazes me how far tech has come since I was in highschool. It seems like there is no limit to what can be done with a few dollars, and internet connection and a list of electronics supplier websites.
well, that was supposed to be surrounded by OldManMode and /OldManMode in brackets…
That is one sexy little copter. the only question is how much smaller can they be ?? + 1
with a cam?
Wonder how it works in wind. I bought an AR Drone awhile back and it hates the wind.
General idea for any flying RC craft is that the bigger it is, the higher wind it can withstand.
hmm interesting I wonder if one could replace the Wii with a smartphone and use the method I used here -> http://www.youtube.com/watch?v=41MRGjdVIMQ to send accelerometer data (+possibly GPS) to arduino. It would be interesting to see if it could work with a non realtime system such as android. Though I’d rather have seperate accelerometer for reliability and use the phone for gps only and as an IP cam
Change battery for supercap, make a charging station, come up with a way for the copter to hover and charge -> ACTUAL humming bird tricopter…
Or maybe even add a few more copters and have the most awesome (and most annoying :P) home decoration :D
This one weights 20g while the Crazyflie Nano Quadcopter weights 125g. Quite a difference
I own an Armattan quad that is plain awesome, fast, you can crash it a ton, and so forth.
My vision is poor and I want a smaller quad so I can fly closer to myself, plus not worry about hacking someone with it. A little tri copter could be the ticket :)
It’s like 20/60 so I loose orientation quicker than I’d like :/
Republicou isso em Julio Della Flora.
A Walk-through on how to get started on making this would be so Bom!!!..
always cooler to build it yourself than buy it right..
I want to build one, really bad lol. Any suggestions parts list, A custom board with parts solered on might be nice though, smaller.