Coming from a lab in France is The Poppy Project, an open source humanoid robot that’s at least as cool as ASIMO.
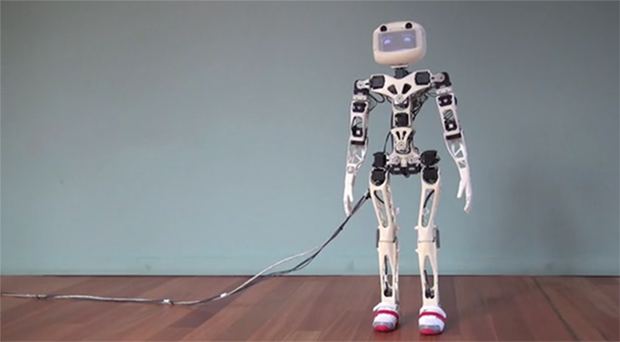
Poppy was designed as an affordable bipedal robot for use in education and art. It’s a small robot at just over 80 cm in height, but it can walk, move its arms, rotate its torso, and interact with bags-of-meat humans with two cameras and an LCD face.
Although Poppy is open source, that doesn’t mean it’s exactly cheap; the current design includes twenty-one Robotis Dynamixels MX-28 robotic actuators, actually servos with magnetic encoders, temperature sensor, and an ARM microcontroller. These actuators sell for about $200, meaning Poppy contains $4000 in motors alone. The estimated cost of the entire robot is €7500-8000, or about $10,000 to $11,000 USD.
Still, there’s an incredible software platform that comes along with Poppy, and being open source any enterprising engineer can take up the project and attempt to bring the costs down. We’d love to take one out for a walk. Just get rid of the hands. That’s too far down the uncanny valley for us. Video below.














If it’s open source where are the files? I can’t find them on their website.
http://www.poppy-project.org/open-platform/
It looks like currently you need to request access to it: http://www.poppy-project.org/hardware-request/
the 3d files are here: https://github.com/poppy-project/poppy-hardware-beta
I made a video showing how to use cheap servos as I/O devices. With this you can get the same resolution as the rotary encoders but for a lot less money.
https://www.youtube.com/watch?v=cAS4mItXzI8&vhs=1
I used the s2309s servos. You’ll need this scad to change the Poppy servo mounts.
https://github.com/GlenSearle/tentacle/blob/master/servo-s2309s.scad
Robotis servomotors include a torque measurement, configurable PID, full digital control through a bus (depending on the model) and mainly, the “28” in the name refers to the available torque…. Your micro-servo is far far away from such power.
Please don’t compare diamond with coal
If you have the real position and the expected position then you can workout torque using the same function the servo’s chip is applying. This is useful for squeezing or poking objects to see how much give they have under different loads.
Why buy diamonds when you can use coal.
If you measure current drawn by the servo, you can calculate the torque. With some calibration, Torque can be found. Measuring current does not required you to modify the servo.
The pot’s signal can also be tapped inside the servo to figure out the position.
T = kT * Ia * Ø where Ia = armature current, kT = torque equation constant, Ø = machine’s total flux
The MX24s have magnetic encoders with 4096 positions over a 358 deg range. The magnetic encoder has the advantage of being contactless, which means they won’t wear out like cheaper pot-based servos will.
Although maybe I miss the point of your post :)
Still, must be possible to get the same functionality, or hack something up that works, for a lot less money. Maybe use 3 Hall sensors and a magnet for triangulation, if it has to be contactless, and if reflecting light off something isn’t possible. Do the maths on whichever processor’s replacing their onboard ARMs.
Seriously though, a servo motor with a 32-bit processor… WHY!?!?
Because above 32ko of Flash, it can get cheaper than an 8 bits MCU with much more functionalities
dang glen this is neat. Thanks for setting me up for a saturday project
Saw this somewhere else quite a while ago. Haven’t seen it walk without a person holding its hands.
I have the idea that this was already posted here, like one year ago..
It has wide birthin hips and is a mix between BMO and Finn the Human. What’s not to like? Overall pretty cool.
Similar project but with tits:
http://www.dannychoo.com/en/post/26957/Smart+Doll.html
Hope those Legs get working…
What is really awesome is the work of Dr Guero!!!!
https://www.youtube.com/watch?v=i_M4gtNkNHQ&list=UU-ujS0hAM5-RNMRyI4HUZmA
Oh! this one is much more impressive
It looks very nice, I just wonder if less expensive servos would have done the job.
It looks like nearly all the cost is the motors. You can use normal servos without the onboard processing power and position feedback but you’ll need to find another way of knowing what the joins are doing.
You can get some ideas what the RC servos are doing by monitoring their currents individually. If someone really want to get full control, He/she can gut a RC servo and control the motor/gear/feedback with a microcontroller.
No mention of the South Park reference? Anyway, I see people mention basic servos but I think they would be too bulky to match the look they wanted. Aesthetics seem to be a factor in this project.
Also coming from France, not open-source, but in the same price range, Aldebaran robotics recently slashed the price of its NAO humanoid robot:
http://robohub.org/nao-next-gen-now-available-for-the-consumer-market/
There’s a few cool demos all over the internet, including TED.
Ways to start the video, in descending order of coolness:
1) Poppy walks into the camera frame itself.
2) The camera fades in on Poppy.
3) Poppy gets dragged in and set down unceremoniously.
Going with #3 wasn’t exactly a good first impression.
At least as cool as Asimo? You kidding, right?
This one doesn’t have one hundredth of Asimo’s capabilities nor its motion abilities (walking, climbing stairs, _running_, recognizing objects and people etc, all of this 100% untethered).
Yes, it is truly interesting and kudos to the creators for releasing it as open source, but that description is misleading and would not help the Open Source philosophy by creating false expectations.
Still, wheel-reinventing seems to be a big problem with robots. Having a few standards, so people can just concentrate on the parts they’re good at, will really help. I think it would need quite a bit of software development to work, not much use just defining motors.
This is what ROS is for. Although many people dislike its limitations/slowness, It’s a good standard for sharing. Our software stack is also modular, and we’re working towards making it a bit more hacker friendly: https://github.com/nubots/NUClearPort
Asimo does nearly anything of what you mention. This is only an automated puppet with pre-programmed scripts. Don’t believe the marketing presentations of Honda and watch the video where it falls from it’s calibrated stairs…
Aldebaran Robotics, Cybedroid, Boston Dynamics have much more evolved robots than Honda
We are on the alpha testers list for this at the moment. It’s an exciting robot due to the cost for something so tall. We’ll be testing it in August after we go to robocup with the current Darwin-OP’s. We did note that it can’t walk yet, but that is a matter of creating a walk engine with good enough balance – it looks like it has plenty of torque to walk under its own power. Our build won’t be tethered either.
As for the dynamixel/servo tradeoff: you can almost get there with a high torque (28kg.cm) servo and a feedback hack. Dynamixel has many more options though. You’d need to use openservo boards to get closer, and I still think the quality of Dynamixel would be better. If I was building at home, I’d go with the 21 century robot posted here previously as it’s a more stable design, and use feedback modified servos.
Sparkfun had a few openservo boards left – you need to fix the fuse settings as they made them all with the wrong ones set. They work great. Alas RobotFuzz has been out of them for some time. http://www.robotfuzz.com/index.php?main_page=product_info&cPath=65&products_id=180
Then use Servo Cities enhancements to increase torque and strength. and you get to use cheaper servos that have been turned digital. Or just use any servo in these products.
https://www.servocity.com/html/actoboticstm.html
I hope Sparkfun make some more openservo boards with proper fuses.
Or you can follow along to a new generation V4 here (one day…):
http://www.openservo.com/Forums/viewtopic.php?t=925&postdays=0&postorder=asc&start=180
Don’t forget Adafruit has a servo mod to get that feedback pot back out to your own micro.
http://learn.adafruit.com/analog-feedback-servos/about-servos-and-feedback
Please note. I am not dissing the Robotis servomotors, they look great, but they are too expensive for me. I offer info for an alternaitive route.
Looks great but I don’t agree with this:
Affordable
The overall materials needed to build your own Poppy robot costs around 7500€ (including motors, electronics and 3D printed parts).
I’d go with relatively less expensive than existing models, but 7500€ is not affordable.
This is definitely amazing but I also agree that the price is not really budget-conscious. I am fascinated by myriad of possibilities with humanoid robots.