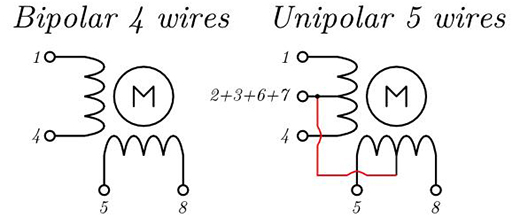
If you’ve been a good little hacker and have been tearing apart old printers like you’re supposed to, you’ve probably run across more than a few stepper motors. These motors come in a variety of flavors, from the four-wire deals you find in 3D printer builds, to motors with five or six wires. Unipolar motors – the ones with more than four wires – are easier to control, but are severely limited in generating torque. Luckily, you can use any unipolar motor as a more efficient bipolar motor with a simple xacto knife modification.
The extra wires in a unipolar motor are taps for each of the coils. Simply ignoring these wires and using the two coils independently makes the motor more efficient at generating torque.
[Jangeox] did a little experiment in taking a unipolar motor, cutting the trace to the coil taps, and measuring the before and after torque. The results are impressive: as a unipolar motor, the motor has about 380 gcm of torque. In bipolar mode, the same motor has 800 gcm of torque. You can check that video out below.














The difference is simple – for unipolar only one coil is powered at any time (1/2 a coil to be precise) while with bipolar both coils are powered.
More current, more torque.
And that’s a gearhead stepper as well, so it has more torque than you’d expect for a small stepper like that.
if only the geartrain wasn’t stupid and different between batches they’d be almost reasonable motors.
stop relying on mechanical properties and employ some sensors on the business end of the thing your motor is powering
It’s a stepper.
Y’know, it moves a certain distance per pulse? That way you don’t need feedback…
Point —————————————>
[rasp_pl]
Steppers can, and often do lose steps. The only way to avoid losing steps with stepper motors is to oversize your motors for your application, then hope that you went big enough. Because without feedback you really don’t know.
Yeah, and?
When was the last time you saw a stepper with feedback? What about a stepper with a gear head attached?
We all know they can lose steps, you don’t see us caring much.
@Tony you may not care, but that does not stop others from caring.
Is position info is vital you use feedback. For example PTZ cameras. They use steppers. They generally all have at least a zero point reference if not constant feedback.
They use drive systems that tend not to allow slippage and usually have a command to recalibrate.
Some are spinning 5kg+ worth of metal at up to 400deg/sec. Ramp up/down speed control, etc.
That doesn’t really solve the problem unless the direction of your load doesn’t change and there are no large accelerations. Otherwise everything will still be able to wobble around within the area where there is play and you can’t do much about it.
In some cases you can add a preload with a spring to keep it from chattering around as much, this does mean your spring will eat up a part of your torque and you limit your travel. If you’re lucky you can use some weak rotational springs from an old printer where they are used for the same purpose.
Sometimes you can also preload your gears (either directly into eachother, or by putting two gears next to eachother and preloading them radially) with a weak spring. This isn’t very easy to do with a small gearbox though. This will also eat up some of your torque, though generally less.
It does make for a ‘play free’ gearbox as long as whatever load torque never exceeds your preload and pushes it out of place.
For bigger systems where this needs some pretty big preloads I doubt it is good for the lifetime of yours gears though.
The same purpose in this case being a preload in general, not the way I described by preloading the actual arm you’re moving.
In fact it is no more current. If the number of turns increases, you have more torque, provided that the current is the same.
Does it affect the step resolution?
no
Microstepping is easier with bipolars motors. (A bit pointless with a gear head motor.)
How is microstepping any easier with bipolar motors? Where do you people come up with this crap? Unipolar is known to be simpler to build drivers for. That is the advantage to unipolar motors in fact. You only have to deal with high side voltages, and no negative swings. That makes the drivers half as complicated. Past that microstepping is accomplished through current control and sequencing. That doesn’t change uni, or bipolar.
Go find two microstepping designs: one unipolar, one bipolar.
Report back with your findings.
(Hint: there are very few unipolar designs. There are a lot of bipolar designs because they’re just a couple of h-bridges.)
A more likely reason is that you don’t find as much is that (almost) noone was doing microstepping back when unipolar motors where popular. Right now there’s no reason not to go bipolar anymore as silicon is cheap as dirt and 8 vs 4 power transistors won’t break any budgets.
H bridges need time delay, and lock out control circuitry to keep disallowed states from occurring. It is considerably more complicated to implement than unipolar designs. Unless your like your stepper drives smoking. To each their own I suppose.
At last somebody said it! Thank you! Some of you people have way too much free time, way too little knowledge and far too strongly held opinions. The half truths mixed in with the myth and legend that is passed off as facts on here is astonishing.
This debate over H bridge vs low side switch driver circuits is a classic example. First up, if you have never designed and implemented the ‘short circuit waiting to happen’ that is a H bridge or even a half bridge then you might say things like ‘silicon is dirt cheap’ and think you sound knowledgeable. I am a professional engineer with expertise and experience in power electronics so to me you sound like you have neither expertise nor experience.
The basic topology aside, the complications and the actual drive method have more to do with how the bridge is sequenced and how the load responds. Inductive loads mean there will be back emf so free wheeling diodes with low reverse recovery times and energies or MOSFET body diodes and lower switching speeds and frequencies (unless you like your electronics to cook) will be required as well as a raft of other considerations depending on the sophistication and functions required.
Unipolar drives need switches with double voltage ratings (the coils act as transformers) and should have snubbers for parasitic resonance effects. Unipolar drives do NOT need high side switches, isolated gate or base drives nor dedicated high side driver power supplies to run the top half of the bridge.
The question of torque has also been amusing to read through. All I can say guys, you don’t get something for nothing. Torque in any motor is directly related to the change of mutual inductance as a function of the displacement (angular or linear). That is the basic principle that gives rise to the torque. The coil current powers the torque but dL/dx is where the torque comes from. You can see this for yourself any time you bring a magnet close to a ferromagnetic material, the force gets stronger as they get closer. However you like to think about that, the fact is it is what I said, the inductance is changing much more quickly as they get closer and that is what causes the increased force. Increasing the turns of the coils increases the inductance. The inductance increases with the square of the number of turns, so double the turns will quadruple the inductance and also double the magnetic flux density. If the magnetic material becomes saturated (too high flux density) then until the field is reduced to below saturation the magnetic material will basically go on strike and stop being magnetic. Very little inductance at that point, so keep it in mind as you tinker and it might help explain what you see.
If you want to run a uni as a bipolar and want to energise both coils and still want the motor to be quick then you will need more volts. The extra turns you will get will increase the inductance and slow the increase in coil current. More volts will overcome this with the expense of much more heat in the coils (and NO, they are not designed for that!).
More sophisticated drivers will drive an initial higher voltage pulse to get the coil current up before dropping back to a sustainable steady state coil current for the rest of the ‘step’.
My 2c worth as a pedant engineer. Thanks for reading. This rant has improved my mood no end. :-)
microstepping bipolar motors is very easy these days as you can pick up a 1/16 capable bipolar step driver for about $2 (A4998 driver)
very good ..thanks.
You could also increase the numbers by travelling to the moon!
There you would get 4829.8.5 gcm!
But 78.45 mNm would be the unit for the modern world…everywhere
The difference between messing around and science is writing it down (in correct units)
Um… mass doesn’t change when you go to the moon. I know what you mean, but you’ve just made a different error.
It doesn’t change, sure! But here it’s used as a force, and therefore creates a equivalent force on the moon. The mass doesn’t change, but 800gcm on the moon would be wrong either way ;)
One should never use a unit of mass as a unit of force…
LOL, What’s youe weight?
I got a mass of approximately 71kg ;)
But weight is the force that results from gravity.
My point is that you are correct but in some cases it is more or less conventional to use the metric mass as a substitute for force.
Yeah ounce inches bitch!
True! That’s why this video was never meant to be science at all when I made it. I was just messing around, as you call it, and I thought it would be easier to use gcm (something we nerds all understand) since I use a plastic cup filled with 80cl of water and measured the “mass” on a kitchen scale, that’s when gravity kicked in. Also, gravity did not change between the measurements of the unipolar and bipolar model ;-) The comparison is true in any unit.
That would be 80ml in the cup. Oops, I did it again ;)
you are sooo modern! wow!
gcm is ok nothing wrong with it. just not as cool as you are I guess
All this shows is that the cheap geared steppers available on ebay are in fact 6-wire steppers… revealed once the blue cap is lifted, i.e. what at first appears to be a 5-wire stepper. For the rest, it’s common knowledge that a 6/8-wire stepper can be configured as bipolar. I was hoping to see a genuine 5-wire hacked up.
Once you open up stepper motor you loose magnetic field and it is ready for the trash bin, so I guess stator rewinding is not an option.
Yeah, I learnt that the hard way ;-/ killed a nice nema 23.
It sounds like you think the magnetic field can leak away somehow…. and assumeably got lost in the mess on the floor or somethng. LOL. I think you just need to be more careful about how you take them apart and put them back together again. Perhaps some research on magnetic circuits would help you too.
Hey kiddo, follow your own advice e be surprised ;-) Yeah, taking a stepper apart do render it useless or at least very weak (much lower torque) … the rotor will demagnetize a good deal if taken from inside the stator …
I really thought that this is common knowledge for everyone who ever worked with stepper motors or ever wonder what’s the difference between the 2. It’s even quite intuitive if you just look at the schematics. I feel that this is on a comparable knowledge level as swapping the polarity on a simple DC motor to make it turn the other direction. It surprises me that this “hack” is worth mentioning as a independent post on HaD…
If you made the product torque by velocity (angular velocity) you obtain (N*m)*(1/s) and the result is power in Joules.
If you get more power from the device, you must increase the power loosed in the winding. This cause an increment in the temperature for the steady state, in the running of the motor.
I can say that this temperature increment is not advisable.
You can burn the machine.
The torque increase is not due to increasing the power in the coils.
A unipolar stepper has four coils and only one (sometimes two) of them are energised at any one time.
A bipolar stepper has two coils, and both are energised.
Basically, running a unipolar stepper in bipolar mode means all four coils are energised all of the time, and that increases the torque. At best running as unipolar means only two coils are energised, typically only one of the four is.
And yes, bipolar mode means the motor will use more power, but it’s rated for that.
The common method for running a unipolar motor bipolar is to run them in a half coil configuration. You lose half of your windings but that’s life I guess. Should have bought the right motors I suppose. I’ve never seen the bullshit that is being proposed here. I seriously doubt that it works too. Well, perhaps it works, but it isn’t right, or likely gaining anyone anything. Probably loses power compared to the conventional method I’d guess.
The reason one would use half coil arrangement instead of full coil when converting to bi-polar use is to avoid increasing the inductance. You will get more torque by using the full coil. Doing so increases the inductance and therefore the time it takes for the stepper to respond to the pulse, increasing the chance of a missed step and reducing the top end speed of the motor.
Using half the coil keeps the inductance low and maintains the top end speed. And since its now in bi-polar mode torque is increased due to the fact both half-coils are energized simultaneously.
No, that’s wrong. If you use only half coils you use only half. That’s independent of energizing both windings or not. But the higher inductance is easily overcome with more voltage. Of course you need a switchmode current control, what you should use anyway in any kind of “serious” application.
Lol.
You just ignore the center tap. Y’know, RTFA and all that.
Why would you both to use half the coil?
Same as 8-wire steppers, you wire the coils together in pairs. You don’t just ignore two of them.
(The retard force is strong in this one today.)
A 6 wire unipolar is not the same as an 8 wire universal stepper motor at all. Because you cannot break the connections inside the motor. You’re the one who is a retard about all of this.
>the result is power in Joules.
Power units is in Watts (W) while Energy is in Joules (J). 1 Watt = 1 joule per second.
How does he measure the torque?
He can measure the distance between rotor and object he is lifting with motor, also he can measure the weight he’s lifting. Length multiplied by weight = torque.
Check the link “torque test” in the video on 0:25 , it links to my other video of the original unipolar test.
OK I read some more of this article an 8 wire stepper motor is called a universal motor. Because depending on which wires you connect together you can make it parallel bipolar, series bipolar, or unipolar. You want to wire it as a parallel bipolar if you want the highest performance possible. Everything else is there just to confuse you. heh
Ah, the ‘expert’ ‘discovers’ something the rest of us already knew about.
Series or parallel is just a question of the available voltage. Although I never had an 8 wire configuration. I have a 10 wire stepper: 5 individual coils in a 5 phase arrangement, but it’s an old GDR (east germany) design without permanent magnets. It’s only reluctance driven and does not have much power despite being the size of 0,5l cup. And I have used 3 wire steppers: 3 phase delta.
Here, I fixed your image for you
http://i.imgur.com/zcWIgva.png
It looks to me, after looking at your image, that this conversion will shorten the motor life. Only 2 coils are used, instead of 4. This might overheat them, and eventually motor goes kaput. And 2 other coils are just unused. So we gain torque and lose … motor.
Control the current and the motor life will not get shortened. It is a shitty solution to be sure but hey it is a shitty motor.
pcf11, this is shit. If you stay with using half coils you gain nothing. You need full bridge drive but the current, winding number and torque stays the same. You need to use a full bipolar configuration, terminals 1-4 and 5-8.
It will NOT shorten the motor life (at the same voltage of course), as in the standard unipolar configuration also only half coils are used at the same time.
Nope, wrong.
Draw it again with your recently learned knowledge of 8-wire steppers, and figure out why it’s wrong.
It is right. Running the full coil current is reduced, resistance, and inductance is increased, which lowers the speed of the motor.
Here’s a useful reference that may clear some confusion about this –
http://probotix.com/stepper_motors/unipolar_bipolar/
The one thing it doesn’t cover is any changes in thermal dissipation. The answer to that question is not as simple as twice the coils, twice the current, X more heat, as many other factors come into play.
Thanks, this clears a lot of confusion. But I still don’t see this configuration being discussed here fitting in any of 6 wiring diagrams in your link. Bipolar half-coil maybe :)?
The conversion being discussed here if from unipolar to what is shown in the linked diagrams as series bipolar.
Look at the difference between the ‘6 Wire Unipolar Connection’ and the ‘ ‘6 Wire Bipolar Connection’ diagrams (2nd & 3rd pics).
Notice the Bipolar has the little circles denoting the wire connection. In the unipolar one that’s the centre-tap to the coils.
In short to get bipolar you just ignore the centre-taps.
5-wire uniploar stepper is pic #2 with the centre-taps joined together, so you need to separate those, and then ignore them to get bipolar.
Thanks Bob and Tony. So all 4 coils are used after all.
At least if you do it right. Theoretically you should reduce the current by SQRT(2) when you use both windings, then the heat stays the same. P=I²R The same current at 2*R will make 2*P as dissipation. [I*0,707]²*2*R=I²R
Been there, done that, got the T-shirt ;-)
This mod is easy and useful but one must take in account that the maximum speed attainable drops dramatically since this is a bipolar SERIES configuration.
It´s not much more difficult to rearrange for a bipolar PARALLEL configuration to get more torque at almost same maximum speed …
You cannot make a unipolar motor a bipolar parallel motor. I’d be nice if you could, but you can’t. You cannot split the coils inside the motor because if you take a stepper motor apart you ruin it. Disassembling a stepper motor causes the magnets inside of them to demagnetize rendering the motor useless.
Well, I´ve being messing around with steppers for over twenty years by now and I can assure you that it can be done and it is not difficult at all … at least for NEMA types from 8 on … I agree that when dealing with the pancake style not always it will be possible.
Yes, the demagnetization will happen if you take the motor apart but this is not required for most steppers … just take the covers out to gain access to the PCB and you´ll find that ALL coils ends are there … some cutting and stitching to bring some more wires to outside and you are done … it is advisable to do this inside a plastic bag to avoid contamination. That´s all there is to it !
So this article is over 2 years old but I’ll stir the pot a bit. Why bother cutting the trace? If the coils are wound closely enough it makes no difference – each center tap will always be at the same voltage, so the wire’s “useless” anyways.
That was my thought at first. And if you loose torque or speed because of the resistance or inductance then give it MORE POWER (more voltage) in a current controlled mode.