After talking with a few of the judges for The Hackaday Prize, documentation will be a large factor in determining who wins and takes a trip to space, and who is left with their feet safely planted on the ground. Stubby the Hexapod is one of the most well documented projects in the running. There are already two hardware revisions for the walking mechanism, several board layouts for the controller, and more project log entries than you can shake a stick at.
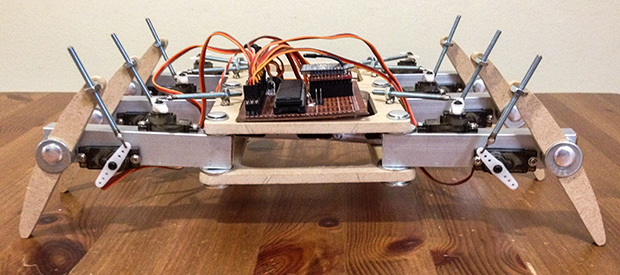
Stubby is the brainchild of [The Big One] (a.k.a. [Wyatt] with [Warren], [Princess Sparkle], and [exot] filling out the rest of the team). The project originally began as an educational robotics project meant for teaching [Wyatt]’s kids the ins and outs of robotics and electronics. He’s doing this by developing an open source hexapod robot platform, complete with a frame, electronics board, and a lot of interesting code driving 18 hobby servos.
The frame for Stubby’s first hardware revision is rather interesting; it’s able to be reproduced with nothing more than a scroll saw. The latest revision is a complete rethinking of hexapod locomotion using 2DOF legs and a more mechanical gait.
Being completely open source and very well documented, you can already make your own Stubby hexapod with a scroll saw and the files on [Wyatt]’s site. If 3D printing is more your thing, there’s also a few files to help you with that.
You can check out a few videos of the different Stubby revisions below:
 The project featured in this post is a semifinalist in The Hackaday Prize.
The project featured in this post is a semifinalist in The Hackaday Prize.














Brian, You forgot to mention that it is open source, well documented and can be made with just a scroll saw!
“After talking with a few of the judges for The Hackaday Prize” before or after the contest ended?
I think he probably means what we heard from the launch judges in the Judge Spotlight interviews. You can find all 8 of them if you scroll back through this category:
http://hackaday.com/category/interviews/
It looks like v3.0 uses 3DOF legs (while v2.0 used 2DOF) – I was hoping to see this project continue to use 2DOF legs, though with a “lift/swing” action (rather than “swing/extend” as the v2.0 walker uses) – like Rodney Brooks’ Ghengis robot used.
I’ve often thought an extremely low-cost walker could be made this way, using these 9g servos with the “lift/swing” action, four legs only, and an integrated PCB/chassis base. The legs could be made of PCB too, and the whole thing “snap apart” – then some screws, a few brackets, etc – and you’d have a cheap walker; it could likely be done in quantity and sold for under $100.00 USD each.
I actually did design and build a 2DOF leg with lift / swing action; I ended up not using it (and barely mentioning it on the site, in fact), as I found the mechanism did not work as well in practice with the small servos. I think that if you had a larger, more powerful servo it could work well, but the small servos just can’t provide enough force and still have enough travel to have the thing walk on carpet (which was a goal of mine, since most of my house is carpeted).
If you are interested, look at the project logs from around 4 months ago. For instance, this one shows the entire assembled frame: http://hackaday.io/project/770/log/2574-thorax–legs-assembled You can read the log from a month or so later, which explains the rationale for changing to a 3DOF design: http://hackaday.io/project/770/log/2866-yet-another-remake
Cheers
Pretty cool .. i love hexapods … nice project !
Send the knob that made that into space. You gotta send someone right?
No name calling. If you have a legitimate beef then articulate it. Otherwise you’re just trolling.
Thanks for the vote of confidence! ;-)
Nice project, How is this a connected device?
The ‘teaching’ part of the project is making a Processing library which gives a simple API to control the robot. Methods such as “moveForward”, “rotate”, “readSensor”, etc are to be supported. The library communicates with the robot over a Bluetooth serial link.
The thought for this library is that it can provide an interesting environment for children to learn basic programming concepts, such as procedural control, method calls, conditional statements, and loops. Much of the backend stuff is already completed, and I hope to have the first messages working from Processing within a couple of days.
Cheers
That does sound neat for teaching.
Sweet! Nice movement. :)
That seems like something I’d love to build.. Need to post a DXF file for it when it’s all buttoned up :)
I’ve been farting around a lot with urethane resin and silicone molds so that could be a fun thing to do…
DXF is in the git repo, and is ready for hacking! (In fact there are a fair number of people who have already started their own versions). See http://stubby.digitalcave.ca/stubby/schematics.jsp (at the bottom of the page) for a link.
Cheers
A general suggestion to pagemakers
Black is a terrible background to read but when you turn style off to read on a white background the true size of submitted pictures shows up . Some massive ones ! Why not reduce the size of photos first , especially blog atavars to abot 350 pixels by 350 pixles.
Look at this project ‘s page and switch to “no style” and you will see my point . “The big one ” really is a data hog with his image everywhere.
Thanks! I hadn’t realized that I had uploaded the full size avatar image. Ooops. It is now replaced with a 256×256 version.
Cheers