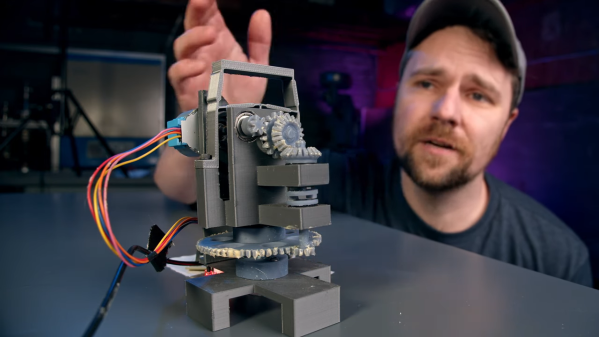
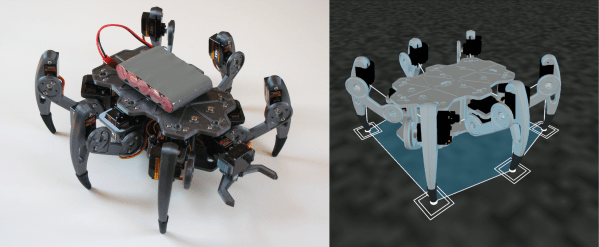
Robots are cool, so check out [Atlin Anderson]’s Spiderbot (video, embedded below) which can be made with 3D printed parts, hobby servos, and ESP32-CAM module for control and a first-person view. Looking for a new project? All of the design details are shared online if you’d like to make a hexapod of your own.
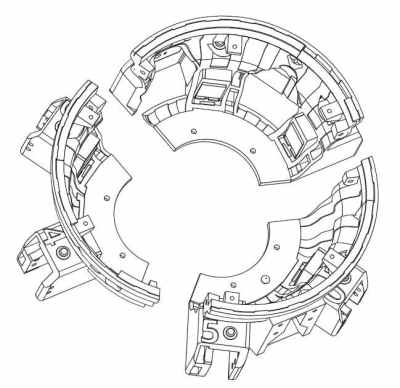
 We like the effort [Atlin] put into minimizing hardware fasteners in the design of the 3D-printed parts, and aiming for a modular concept that leaves things open for expansion or modification. There’s plenty of room in the chassis for more hardware, with a convenient peg system for snap-fitting assemblies.
We like the effort [Atlin] put into minimizing hardware fasteners in the design of the 3D-printed parts, and aiming for a modular concept that leaves things open for expansion or modification. There’s plenty of room in the chassis for more hardware, with a convenient peg system for snap-fitting assemblies.
Control is done wirelessly via a mobile phone with an app created using the MIT App Inventor, a fantastic tool that is still going strong as a capable and accessible way to make an Android app.
As for the ESP32-CAM module that drives it all, it is a great piece of hardware with capabilities that are leveraged very nicely here. We’ve seen other projects make good use of it as well, from this 1/64 scale micro RC car to an oddball tripod camera robot.
Continue reading “Fire Up The 3D Printer And Build Yourself A Spiderbot”