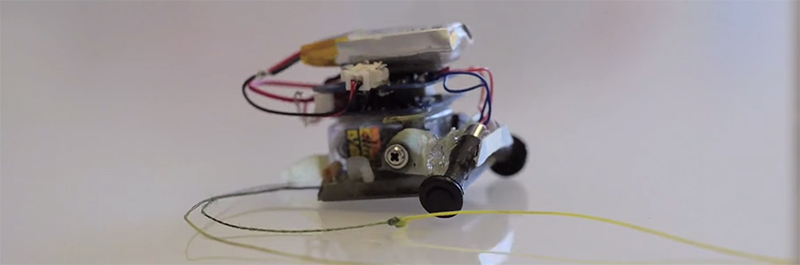
If you need to build a robot to carry something, you need a bit motor, right? Not so with these tiny robots out of Stanford’s Biomimetic Dexterous Manipulation Laboratory. One of these 12g MicroTugs can drag a 600g mug of coffee across a table, or even a 12kg weight. According to the authors, it’s a, ‘capability … comparable to a human dragging a blue whale.’ Square-cube law notwithstanding, of course.
What makes these little robots so strong? It’s not the actuators; it’s their feet. On the bottom of this robot is a material that uses mechanical anisotropic adhesion, a fancy material that only sticks to flat surfaces when it’s being pulled in a specific direction.
The best description of this material inspired by gecko feet would be this video, also from the Stanford BDML lab. It’s a neat material that we’ll probably find in Post-It notes in a decade, and with a single motor, a tiny robot can lift thousands of times its own body weight.
Videos below. Thanks [Adrian] for the tip.














Fascinating little trinkets. I look forward to seeing what practical uses people can come up with for them. As impressed as I am with the technology, I don’t think there’s a huge need in the marketplace for devices to move coffee mugs around.
Cranes! Image a self-building crane which uses really little motors. Or little glass washers which climbs on skyscraper’s walls. Big energy savings on storehouses.
Both are good ideas, but looking at the practical side makes those seem much less likely. For instance, glass buildings are not a single contiguous sheet of glass. How would these things deal with the separations between windows, which can often be several feet or more in width?
One or more per window. It doesn’t seem like that they would cost a lot to make in large quantities.
I saw a really cool project like this – it was a solar powered ‘robot’ that cleans… solar panels.
However, the inventor admitted it had a lot of practical issues. Still a cute idea.
Reblogged this on Julio Della Flora.
“If you need to build a robot to carry something, you need a bit motor, right?”
What’s a ‘bit’ motor?
Cool little robots though. Anchoring down and using the winch and then moving forward makes sense. Although they don’t seem to be letter rope out as they move forward.
A bit motor is for propelling data from one place to another of course…
IDK but quick googling provides info to a ‘mud motor’… which does not seem correct, at all. I’m thinking he wanted ‘big’ because overly verbose synonyms creates an enigmatic reading that is unacceptable for click bait. Meh kinematics, make sure the motor gives enough torque for the job, even if you have to gear it, as most motors do; then balance torque with angular velocity.
It’s what you get when you mis-spell “big motor”.
They are the motors used by serial buses.
Thankyou and goodnight!
Wonder what crazy dude will try to climb a glass sky scraper with those pads.
Some climb them without it.
Its been done!
“Prototype This” – a really cool show! With Joe Grand, who has products and projects featured here. Very fun to watch, and a shame there is only 1 or 2 seasons. I binge watched them.
Surveillance. A tiny robot with a microphone that can cling to a window pane (after being deposited half way up a skyscraper by a small quadcopter when nobody’s looking).
I bet the CIA are all over this.
… there’s technology to convert the minute vibrations from a window into speech. Like there are basic consumer grade over priced pieces of shit you can buy… http://en.wikipedia.org/wiki/Laser_microphone
That was a popular mail-order project in the back of magazines – I think it was Popular Science or Boys Life! Heh. I am getting older..
… and then let go of the glass and fall to the ground again once it’s finished spying on bankers.
Idea: make a small bot crawling inside a tube, wedging itself in both direction, connect to a pushrod and you got a powerful cylindrical actuator. Where do I get a small patch of that material?
There are a lot of reasons your idea is not very good.. Were you joking?
Not joking at all. Sure it wouldn’t be the fastest actuator but it would stay in place without power, no need for an additional brake. Perfect for self leveling tables..
Do You know about piezoelectric linear actuator? So why not trying, it’s more a question of how to do it.
Thinking larger, pedestrian pallet trucks, recovery vehicles deploying a cluster of these at points to winch heavy things out of awkward situations, plant machinery moving by riggers, vehicle recovery. I quite often have to resort to a pair of winches or come-alongs moving larger things so familiar with the move-reposition scenario. Though in the case of vehicles that actually warant recovery I would guess that the ground conditions are not suitable for the gripping feet.
There are a lot of possibilities for a cloud of these working collaboratively. Software designing dynamic pull loads at various points to produce a final direction vector with reduced side slip possibilities due to the multiple hitch points.
I wonder how smooth and even the surface has to be for them to work though. Polished industrial flooring concrete surfaces? Work in rain droplet covered surfaces?
Very interesting, just thinking out loud.
Is this “gecko material” something the hobbyist can get ahold of somewhere?
You could probably kill some geckos if you’re the psychopathic type.
Since when is harvesting a natural resource evidence of psychosis? Oh, yeah, when liberals started brain-washing school children (which includes you, apparently).
BTW, the skin probably doesn’t work as well (if at all) once detached from the gecko, so I don’t recommend it, but I won’t assassinate your character if you try it, because I’m not a psychopath.
Must have this! As others have mentioned, where on earth can we buy some of this anisotropic material? Been scouring the web to no avail.
You probably have to make it – its an experimental material still.
I posted a video below that has some scant details on one potential method that fails : laser cutting thin grooves and casting silicone rubber in it – but it failed – in the video below they resort to using material prepared by a university – which, if I recall (watched these a few years ago), they made also using the method above.
Ok! Here look at this:
https://www.youtube.com/watch?v=0yp9tsthL8s
Can you please share the details on how to make such robot insects.I would really need it for my home.