
ATRIAS has just taken its first steps outside on grass, marking an impressive achievement for this university robotics project.
Built by Oregon State University, ATRIAS is a bipedal robot whose name in jest stands for “Assume The Robot Is A Sphere”. It’s an old physics joke really, which describes how any complex scientific model can be reduced to its simplest form in order perform calculations — but sometimes (always) makes its application in reality a challenge…
We’re sure you all remember BD’s Big Dog and its impressive ability to throw freaking cinder blocks — but remember, it has four legs and a tail — or is it a trunk — an arm? ATRIAS on the other hand is a true threat to humanity and our unique ability to walk around on two legs. And the mechanism they made for it is pretty damn clever.
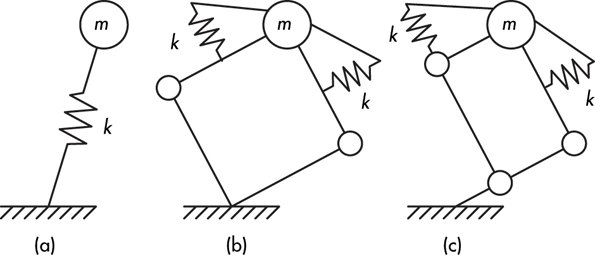
In simplest terms it uses a spring-loaded inverted pendulum to balance — and walk.
The beautiful part of a system like this is efficiency. Like what regenerative braking does for electric car efficiency, the springs reduce the amount of energy required during movement, just like how our own muscles use tendons and tissues to conserve energy by being springy. There’s a full explanation of it by the team over at Machine Design from a few years ago.
Anyway, here’s ATRIAS taking its first steps outdoors.
And if you can dodge a wrench…
[via Popular Science]














I realise some countries struggle with metric, but you would think people working at a university would be able to use the correct SI unit. It is km/h, not ‘kph’.
And mph is mi/h. This isn’t a scientific journal so shush.
It’s actually written km.h^-1 and the actual SI unit is m.s^-1
But whatever I’m just a programmer!
A nit-picky irrelevant complaint does not look better when it’s also wrong :). (It would be m/s to be SI, as said above).
I like the leg movement and the hip-actuator on this. Nice gait.
*I pressed the damn report button again instead of reply. Sorry.
In theory the cow is spherical. Reality is a special case and can therefore be ignored.
Once again, HaD comments need a like button!
Yup!
(like) XD
the e stop was not visible until they changes somthing
The unit had rotated round – not the estop stick on its ‘head’ is on the other side
i would like to see it get kicked like bigdog
I’d like to see it kick someone back upon getting kicked.
I’ll just leave this painful memory here:
https://www.youtube.com/watch?v=K1m8fYsPMnY
Hm, looks like they have a…. swingy mass thing(?) to stabilize the robot in the middle. (the red beam in the square hole)
Reminds me of those delta style packing machines. Has someone made a four-legged robot using those yet?
Oh, wait. Screw me, that’s no pendulum. RTFA, to myself eh?
The delta robots used in pick and place are used for speed and integation with vision systems rather than lift capacity – biggest ones can only do a couple of kg. (see video), and most of them are built with very light components to run faster. It looks like the walking unit doesn’t have spherically mobile “hips” so is modulating fore-and-aft and side-to-side with planar rotation. That doesn’t mean someone couldn’t do it, but there probably isn’t much gain in using a classic delta system in exchange for a lot more complexity.
https://youtu.be/ImgKkMpLTg8
Anyone else think of this?
https://www.youtube.com/watch?v=JYsfhxnX-Zg
It won’t be long…
Wow, I know it’s HaD, but that’s a mother of a typo. “adieu” = “to God”, originally used as in “You’re dead, see you on the other side.” (now tamed a bit to mean “bye”). So Skynet really is here and will kill us all? (Perhaps the OP really meant to type “without further ado”)
Fixed
A thankless job. Noli illegitimi carborundum, Brian.
+1
Regenerative breaking?
Regenerative BRAKING.
Sigh.
Fixed
Regenerative breaking would be much cooler, though… I for one welcome my new self-healing-bipedal-robots-who-are-looking-to-take-over-the-world overlords!
(And don’t mind the grammar / spelling nazis, guys… I understand the kind of effort which is put into this site. Keep up the great work!)
Cheers
Seems jumpy, can’t they make a bipod that doesn’t need to keep it’s legs moving to stay upright?
They watch too much boxing.
“its legs”
I think that it would need multiaxis driven foot do compensate for minor unbalances while standing still.
Probably with an in-body gyro mechanism you could get around that but why bother when you can do just another step with the hardware you already have integrated (legs) and you don’t need to conserve energy.
On the other hand it looks disturbingly like a marching soldier …
I think it’s because all US robots are made to be military robots and as we all know from games jumping up and down like a bunny on XTC makes you quite unhitable
If you want non-hopping there’s the japanese robots like asimo and stuff.
Boston Dynamics proudly presents: the killing machine de jour.
Just you wait until it starts to throw balls at humans…
At least it has a built-in selfie stick.
haha!
So now facebook can buy this thing and google and facebook can duke it out on the robot battlefield.
And then later the more pay-per-view upscale battle between robots from samsung and apple one would assume.
Anyway, check youtube for ideas on how to build your own nuclear shelter a few hundred feet under your basement.
Why would they throw those balls and risk hitting that LCD screen near the lab door? I call fake simply because of this… no one would risk breaking an LCD.
They should use bowling balls instead. Or maybe Ewoks.