For his project entered in the Hackaday Prize, [Neil] is working on a navigation aid for the blind. He’s calling his device Pathfinder, and it’s designed to allow greater freedom of motion for the disabled.
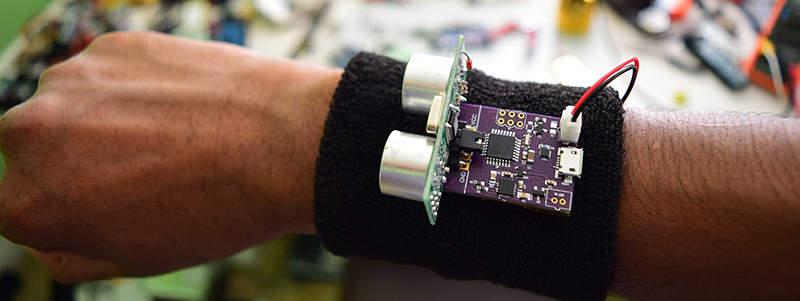
Pathfinder is a relatively simple device, with a cheap, off the shelf ultrasonic distance sensor, an ATMega, and a few passives. On its own, the ultrasonic distance sensor is only accurate to about 5%. By incorporating a temperature sensor, [Neil] was able to nail down the accuracy of his sensor to about 1%. Impressive!
For the machine to human interface, [Neil] chose haptic feedback, or small vibration motors tucked away inside a wristband. It’s by far the easiest way to add the output needed, and with a haptic motor driver, it’s easy to add specialized drive patterns to the vibration motor
You can check out [Neil]’s quarterfinal entry video for the Pathfinder below.














I can’t see how the impressive improvement in accuracy is needed here. This is a wand space-indicator. You move it about and get a feel for it’s readout.
However, I see circuits naked to the first splash to halt further use. Wearable=wet-able.
We all have to go to the restroom and be able to wash up.
It’s a prototype you dullard.
I think the extra accuracy gives a better worldview to the blind/impaired person the same way glasses give accuracy to short-sighted people. The different patterns of vibration could be a neat close-hauled warning system. I think this is a great implementation of an old idea. Simple and effective.
Also, nice one Fennec. 8-)
I think it’s nice and all that, but I wonder if a blind person would really use this over a stick, a stick probably aligns more with the way humans store spatial information in the brain. You have a natural memory for appendages and a variable distance of a sensor like this is confusing to the brain.
And I’m not saying that to knock this effort, but perhaps someone can think of a way where this human preference can somehow be incorporated into more modern sensors like this one.
Yeah, the temp compensation is really just for fun – the limitation for now is human haptic resolution, not absolute distance accuracy.
As for the casing, I wish I had one! It’d really make for cleaner demos, and is more comfortable for users than an exposed PCB. Luckily, HAD awarded me a $50 Ponoko credit a while back, and I’ll be sure to get a cool case with that. However, I was once told to “never pick an enclosure before finalizing the components inside,” so I’ll have to abide by that – especially since Pathfinder’s dimensions are still changing. Besides, I quite like the OSH Park purple, and it’s always cool to just look at the (hand-populated!) tiny components :)
I once made a haptic shoe prototype that turned into a product http://anirudh.me/2011/06/le-chal-a-haptic-feedback-based-shoe-for-the-blind/
If there is nothing like this around already, this is a great idea. Especially because it’s so simple
This is the one i remember from a while ago… http://www.instructables.com/id/Haptic-Feedback-device-for-the-Visually-Impaired/
It’s probably less sociably acceptable…
at least in the prototype state. You might integrate this thing into a hat or something.
This is pretty cool for the partially sighted. I wonder if it would make sense for it to be incorporated with a cane for some people? I don’t think this could replace a cane, given the much more full tactile feedback, but it could certainly add to it.
Exactly the idea – we are unlikely to faithfully represent fine details (e.g. textures or really small obstacles) through haptics alone. So, as a complement to the cane (notice that Pathfinder, sitting on your wrist, tries not to impede function of your hand). we want to add longer range, non-contact (think navigating around people in crowds – want to tap everyone?) detection that can be controlled more fluidly (just point at the world around you, rather than carefully tapping it out with a cane).
Since the user will still probably need the cane, Pathfinder has to be minimally invasive/annoying – no beeping, requiring hourly battery swaps,, or even costing too much – we just want to slip a couple new (and we think, rather valuable) features into a user’s existing workflow.
You should add a second sensor on the bottom, set to a 45 angle, that would give alerts small objects in your walking path while you navigate tall obstacles.
Kudos for taking on the challenge!!
The most difficult thing about changing the world for the better as a hacker is finding the problems you can actually solve, this is a prime example of a problem that is begging for a solution.
(“problem of the week” on HackADay?)
3 sensors at different angles would probably give a better end result for the user if you can get the size smaller, I don’t think those ultrasonic sensors handle moisture and dirt very well, optical range finding would probably be preferable for that and you can probably combine the 3 sensors in one, the problem with those are the cost and different ranges of different modules.
Possible problems:
What if the battery runs out?
What if multiple people use the same device at the same location?
Thanks Max! I’m always looking for more feedback and insight!
I agree that having a wider FOV for Pathfinder is important, but I’m trying to constrain the whole device to wrist-mountable proportions. Ultrasonics are cheap, accurate, and reliable for these ranges (0-5m) but are rather bulky. However, IR (reflectometry) sensors really don’t have enough range (best I’ve seen are ~200cm) and are vulnerable to strong ambient lighting conditions, which hurts use potential of an everyday device. The best would be time-of-flight or phase-measurement laser rangefinders, but those are cost-prohibitive and not often tailored to short ranges.
Also, the nature of ultrasonic sensors gives them a ~30 degree cone of detection, so it isn’t as tunnel-visioned as you might think. Still, having extra awareness, especially in the vertical dimension, seems necessary before using Pathfinder as a daily driver.
RE battery life: I’m aiming for at least a day of full usage. The biggest draw is the vibration motor, so advances there are especially important. I’m moving from ERM to LRA now, which should improve efficiency quite a bit. Additionally, better gesture control will allow Pathfinder to sleep more often, again saving me a bunch of power. Nominal life right now is ~12 to 16 hours on a 1250mAh LiPo (pretty much the largest cell that fits comfortably). And when the battery is dry, I have a charger circuit onboard and a micro-USB connector for power, so I’ve attached a little Qi wireless power receiver (meant for phones) to Pathfinder as an easy way of enabling wireless charging.
RE interference: Yes, if all the sensors are using the same frequency (all Pathfinder revisions use 40kHz), some pulses will bounce around and interfere. However, the sensors themselves have a bit of “error-correction” in that they send bursts of 8-pulses at a time, and we poll the sensors at a rate of ~20Hz so any spurious interference will hardly be noticed. Also, since Pathfinder is mounted to your hand, it’s almost always moving, making these events unlikely and one-off even in a small environment with multiple Pathfinders.
Thanks for the extra insight.
The sharp rangefinders go up to 5,5 meters, the only downfall is that (only) the optics of that specific product give it a minimum range of 1 meter, here’s a website that can shed some insight https://acroname.com/articles/sharp-infrared-ranger-comparison
The main advantage of IR is that you can use small mirrors with one receiver/transmitter and use multiple optics at multiple degrees and that the unit would be small and shielded from the environment.
As you mentioned before ambient light conditions are the biggest problem with the above.
What if you ditch the vibrator motors and go for something else?, maybe a bone tranceducer or something?, you can think outside of the box because these people have their sense of touch dialled up to the max.
p.s. doesn’t the SR04 have a 15 degree angle of detection?
Thanks for the link – I didn’t know that existed! In my previous searches, I always had a minimum range constraint of ~10cm, ideally 5cm. Barring an entirely new class of rangefinder tech, ultrasonic seems to be the way to go for 10-500cm.
Cool idea about bone transduction – fundamentally, it’s rather similar to haptic feedback, though probably with a different sensitive frequency range. Though where is the vibration to propagate to? If it ultimately ends up at the same mechanoreceptors, we might as well cut out the middleman – the hand/wrist area is heavily innervated with Meissner corpuscles, which respond most strongly to vibrations in the 30-50Hz range.
Looks like you’re right, the SR04 is widely cited for 15 degrees of “vision,” but there are so many variants and other sources of inaccuracy that it’s hard to test definitively. In my own prototype tests I’ve seen anywhere between 20 and 30 – ultimately, I decided not to rely on the sensor FOV too much, and rather encourage users to move their hands around freely (consider the “FOV” of a cane, and imagine a similar use scenario).
Thanks for the comments, everyone. This iteration of Pathfinder isn’t the most groundbreaking – it’s just the barebones launch platform on which to build something truly new. I wish I’d had more time to develop and document my progress, but I’ll go ahead and share my game plan on how to make Pathfinder very different from existing solutions:
1) Haptic resolution. If you’ve worked in this space before, you’ll know that quantitative haptic feedback is very difficult to acheive (as opposed to binary on/off feedback). But there have been some recent advances here, like Apple’s “Force Touch” system in their trackpads – yes, it sounds like a gimmick, but the quality of haptic feed back they’ve achieved is really something (the vibrations almost perfectly emulate a button press). That is the goal for Pathfinder – we want extremely high quality haptics, not a simple ERM as in the current revision. Also, consider the fact that blind users have significantly higher haptic sensory resolution than sighted humans – think about the very intricate patterns of Braille and how quickly they parse the tiny bumps. Even the primitive prototype I have today works surprisingly well for blind users, with a bit of practice.
2) Feedback patterns. Not a whole lot work done in this area, but I think it’s integral to making a device like Pathfinder perform. Right now, the only parameter we control is the frequency of haptic pulses, which in turn is set by a logarithmic scaling function that varies by distance. The idea is to redistribute our finite haptic resolution to useful ranges, i.e. you probably care more about 5cm changes at 25cm than you do at 250cm. Later on, we’d tailor these ranges and sensitivities more closely, with perhaps an autoadaptation function to work across environments.
3) Environment awareness/Live user control. Right now, this just means throwing on a 6-axis IMU and responding to a few well-defined cases, such as sleeping when the device is pointing towards the ground for a while or is left stationary. Again, primitive stuff, but it does add an element I haven’t seen before in similar devices, and has a lot of potential for improvement. I think gesture recognition would be a great, intuitive way to interact with the device, and perhaps help us with the issues mentioned above (think about having multiple range/sensitivity modes, set with a wave of your hand).
Just some notes I thought I’d jot down. Please keep the comments/ideas/criticism coming (on the project page, maybe), and I’ll do my best to keep putting out updates. I really don’t want this to be just another hobby, one-off project – this is a simple idea worth executing on, and the tech we need is now readily available.
This is not just for the blind. This is part of the nonvisual interface the world requires so we can stop looking down at our phones. It should be tactile and audible and there is no need for a display anymore.
The tech needs to be transparent. As in, I don’t need to know I’m using it in order to use it effectively. And that’s where I think the people with their faces in their phones aren’t paying attention — tech should enable us to connect more locally with our environments WITHOUT preventing us from making the long distance connections they provide today.
Getting spoken feedback in your headset all day is far superior to having to stop and look at your phone all the time. And you are able to decode sounds as complex as language, so the audio interface that hasn’t been developed yet really will be the next thing. Keep it up!
This seems quite similar to an existing product (from four years ago, no less) http://www.popsci.com/diy/article/2011-08/diy-haptic-wrist-cuff-gives-blind-people-sonar
I wonder how this project is different and/or superior to the existing offering.
I’ve seen that project! In fact, the Tacit and other pieces of prior art have inspired and informed Pathfinder’s development.
Major differences:
1) Level of integration – The Tacit was nicely packaged into a neoprene sleeve, but is mostly point to point wiring under the hood. Pathfinder has had fully custom PCB’s for a while now, significantly decreasing system footprint and enabling advanced features, such as an onboard IMU and battery charging circuitry.
2) Feedback method – I initially profiled alternatives to vibration haptic feedback, and considered adapting the pressure-based system used in Tacit. However, I predicted and confirmed that coin-cell motors mount close to the skin offered a greater resolution range than a servo-based pressure system on the forearm. Furthermore, using vibration motors further reduces footprint, and possible power (not sure, didn’t profile the pressure system).
3) Sensors – The Tacit has two rangefinders, Pathfinder has just one (for now). I’m working on adding more without massively increasing size (probably requires moving to a custom single-transducer design).
I’ll keep working on Pathfinder to set a new bar in terms of haptic navigation solutions, which have definitely existed in various forms before. See above for an idea of how we’re making Pathfinder different. Check out the git repo too, if you’d like to see exactly what I’m talking about!
Oh awesome, thanks for the clarification :)
You’ve clearly put a lot of forward thinking into what seems to be a more solid design.
Just curious, what motivated/inspired you to create this project? Is anyone close to you visually impaired, or is it simply the challenge? Either way, nice work!
You’ve honestly got to be kidding me, I discussed this concept with my co-conspirator and we determined although it was a neat though they (Hack-A-Day) Wouldent want and useless concept vapour ware projects submitted.
If this guy wins ANYTHING I am going to remove and eat my transplanted kidney on a live stream.
I wonder if those actuators apple uses in their watch and new touchpads are expensive on dx and ali and ebay and such. I mean the tapping thingy. Might work better than vibration in some scenarios when doing feedback for the blind, and might be faster too.