Over the last decade or so, we’ve been inundated with appliances with wireless or “smart” technology that is often of dubious utility. No one really needs a tablet in their refrigerator or Wi-Fi on their coffee maker. A less glamorous kitchen appliance that actually might benefit from some automation and connectivity is the garbage can, or “bin” for those speaking the Queen’s English, and [Mellow_Labs] is here to show off just how to get that done with this automatic garbage can lid.
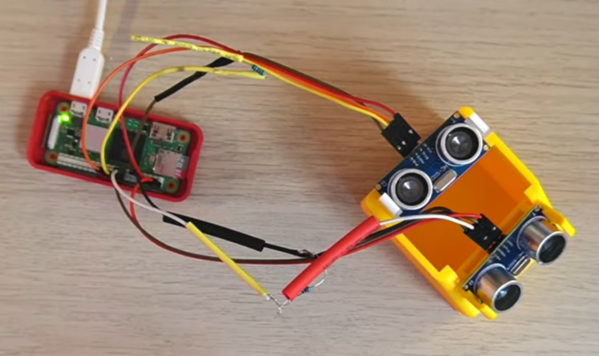
As he explains, the real impetus behind this build is to not have to touch a dirty lid while cooking to avoid having to take time to wash one’s hands again afterwards. There are a few other design criteria as well; it has to be roommate-approved so nothing permanently attached to the lid, overly complicated, or with an unnecessary amount of wires or other fixtures. A servo with an extension sits on the lid itself, and when activated forces the lid open. A distance sensor provides basic gesture recognition and a microcontroller with wireless connectivity controls both and provides home automation integration as well. With a 3D printed case that includes a quick disconnect function for easy cleaning of the lid, the build was ready to be put into service.
The first iteration used an infrared distance sensor, but placing it by an open window caused it to continuously open and close since sunlight has the same wavelengths of light the sensor is tuned for. A quick swap with an ultrasonic sensor solved the problem, and the garbage can is working flawlessly in the kitchen now. Another appliance that is generally not targeted by off-the-shelf automation solutions is the range fume hood, but another build tackled that problem a while back.
Continue reading “Automatic Garbage Can Keeps Cooking Cleaner”