Gyroscopes are perfect to damper short impulses of external forces but will eventually succumb if a constant force, like gravity, is applied. Once the axis of rotation of the mass aligns with the axis of the external torque, it goes into the gimbal lock and loses the ability to compensate for the roll on that axis. [Hyperspace Pirate] tackled this challenge on a gyroscopically stabilized RC bike by shifting a weight around to help keep the bike upright.
[Hyperspace Pirate] had previously stabilized a little monorail train with a pair of control moment gyroscopes. They work by actively adjusting the tilt of gyroscopes with a servo to apply a stabilizing torque. On this bike, he decided to use the gyro as a passive roll damper, allowing it to rotate freely on the pitch axis. The bike will still fall over but at a much slower rate, and it buys time for a mass on the end of the servo-actuated arm to shift to the side. This provides a corrective torque and prevents gimbal lock.
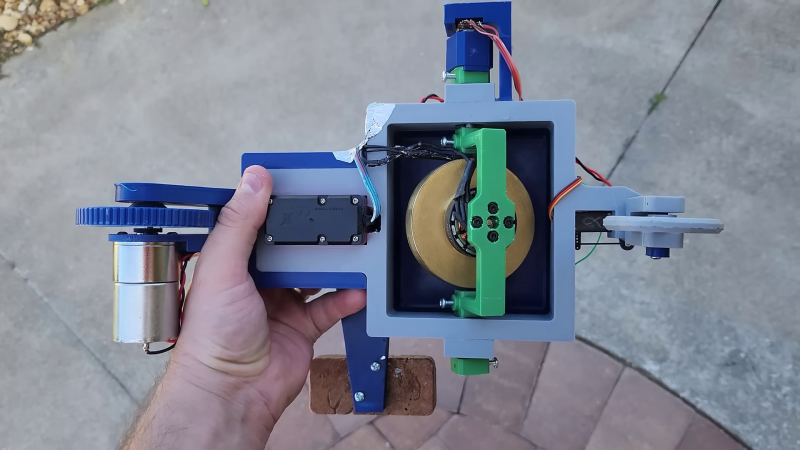
[Hyperspace Pirate] does an excellent job of explaining the math and control theory behind the system. He implemented a PD-controller (PID without the integral) on an Arduino, which receives the roll angle (proportional) from the accelerometer on an MPU6050 MEMS sensor and the roll rate (Derivative) from a potentiometer that measures the gyro’s tilt angle. He could have just used the gyroscope output from the MPU6050, but we applaud him for using the actual gyro as a sensor.
Like [Hyperspace Pirate]’s other projects, aesthetics were not a consideration. Instead, he wants to experiment with the idea and learn a few things in the process, which we can support.














Very neat video. But, you don’t need to shift weight to make this thing balance. It will balance itself very nicely if you simply make the gyro top-heavy. Move the rotor and motor up so that the CG is 1 cm above the axis of the gimbal and voila, it self-balances and no shifting of weight necessary and you have saved all that unneccessary weight. But even this will not save this vehicle from falling over when turning sharply. A Self balancing single gyro works if the vehicle is turning in one direction but not the other.
So, an even better solution that this model is so close to but not there yet is: simply rotate the gyro so that the gimbal axis is parallel to the ground and the rotor plane is parallel to the length of the chassis. See the GyroX car which uses a single gyro in this orientation. Now, the vehicle can turn right and left with no problem.
The MPU6050 is not necessary either as it is subject to vibration. The potentiometer is all that is necessary to measure the angle of rotation of the gyro and make corrections with the servo. There is a problem with the servo though: the gimbal needs to be free to rotate as if there is any torque applied to it, it will cause the vehicle to fall. A better system is to use a motor that has very little torque and attached to the gimble through two gears. Then when no corrections are necessary, the gimbal is free to rotate without restriction.
But nice project and great video.
Nice comment!
But, this is Hackaday, you forgot to be negative!
B^)
And there’s no obligatory 555 timer comment
Gyroscopes are weird.
Consider the case: you have a long beam, like an inverted pendulum, on a hinge on the floor. If you lift it up straight and let it go, it will fall down to the ground naturally. The beam cannot twist or flex around any other axis. It’s going to fall like: l / _
Now if you fix a spinning disc to the free end of the beam, 90 degrees to the axis of the hinge, the gyroscopic action is presumably going to resist the beam rotating and falling down, but apparently if you don’t actually let the gyroscope rotate around more than one axis (the beam cannot twist or flex) it will do nothing and the beam will fall down just as before. If it can rotate around two axis, then it exhibits some sort of inertia multiplying effect and slows down the fall by requiring more energy to accelerate the system.
In other words, if you allow the gyroscope to turn 90 degrees from the plane of rotation you’re applying without restriction, then additional work is required to accelerate the system to turn, but if you restrict the disc to exactly one axis of rotation (besides its own axis of spin), then it can’t do anything and the system acts the same whether the disc is spinning or not.
I found two answers – it will or it won’t – depending on which bit of math you use. It’s kinda difficult to test it in practice on a small scale. I tried it by spinning a CD on the end of a chopstick, but I couldn’t make heads or tails of it – too much other interference.
To recap: imagine a windmill, but instead of the blades you have a big solid disc. There’s a hinge at the bottom of the tower and the whole thing can fall forwards until the solid disc hits the ground flat. Does it make any difference in the falling speed if the disc is spinning or not? How about when the spinning disc can pivot freely around the tower and turn sideways as it falls?