
There’s no rule that says that logic circuits must always use electrically conductive materials, which is why you can use water, air or even purely mechanical means to implement logic circuits. When it comes to [soiboi soft]’s squishy robots, it thus makes sense to turn the typical semiconductor control circuitry into an air-powered version as much as possible.
We previously featured the soft and squishy salamander robot that [soiboi] created using pneumatic muscles. While rather agile, it still has to drag a whole umbilical of pneumatic tubes along, with one tube per function. Most of the research is on microfluidics, but fortunately air is just a fluid that’s heavily challenged in the density department, allowing the designs to be adapted to create structures like gates and resistors.
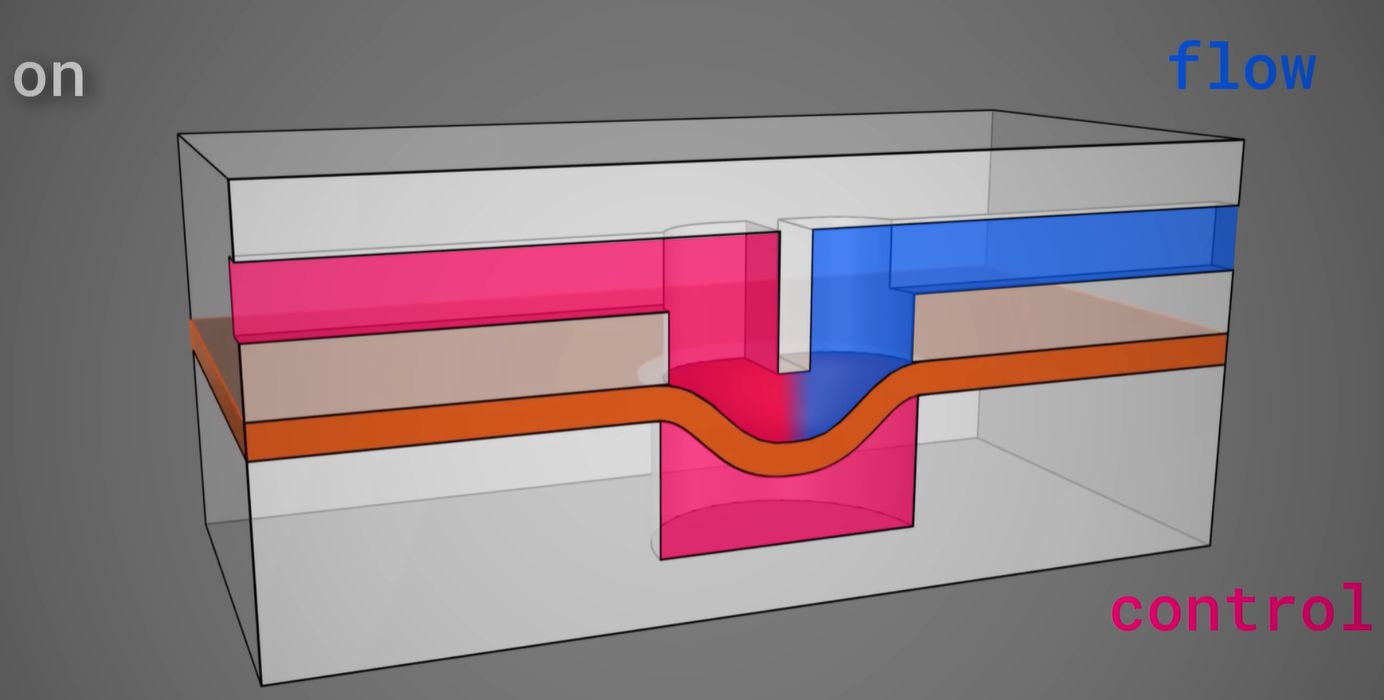
Logically, a voltage potential or a pressure differential isn’t so different, and can be used in a similar way. A transistor for example is akin to the vacuum tube, which in British English is called a valve for good reason. Through creative use of a flexible silicone membrane and rigid channels, pulling a vacuum in the ‘gate’ channel allows flow through the other two channels.
Similarly, a ‘resistor’ is simply a narrowing of a channel, thus resisting flow. The main difference compared to the microfluidics versions is everything is a much larger scale. This does make it printable on a standard FDM printer, which is a major benefit.
Quantifying these pneumatic resistors took a bit of work, using a pressure sensor to determine their impact, but after that the first pneumatic logic circuits could be designed. The resistors are useful here as pull-downs, to ensure that any charge (air) is removed, while not impeding activation.
The design, as shown in the top image, is a 5-stage ring oscillator that provides locomotion to a set of five pneumatic muscles. As demonstrated at the end of video, this design allows for the entire walking motion to be powered using a single input of compressed air, not unlike the semiconductor equivalent running off a battery.
While the somewhat bulky nature of pneumatic logic prevents it from implementing very complex logic, using it for implementing something as predictable as a walking pattern as demonstrated seems like an ideal use case. When it comes to making these squishy robots stand-alone, it likely can reduce the overall bulk of the package, not to mention the power usage. We are looking forward to how [soiboi]’s squishy robots develop and integrate these pneumatic circuits.














Microfluidics!!! Heres a paper that really dives into using Quake Valves (the valve he uses and a massive innovation by Stephen Quake at Caltech( https://www.science.org/doi/full/10.1126/science.288.5463.113 )) and fluidic transistors (https://www.nature.com/articles/s41586-023-06517-3#Sec2) .
This is the kind of genius we need to use when it comes to cleaning up a nuclear reactor that has melted down.
Very cool
I’ve seen pneumatic valves that do the same thing and can be ganged together, but that doesn’t mean that this isn’t neat or useful for protyping.
I’ve seen similar things used in dairies for old milking systems and for systems where they didn’t want any electricity because of issues that might happen in the future due to cows notorious sensitivity to electricity.
Even things like pneumatic ring oscillators. FYI, some pulsators used for milking are also similar.
For anyone interested in this stuff, I would definitely recommend looking at what tech dairies have used. Though the old stuff might be real hard to get documentation on.
This is a REAL cool use of the tech, I don’t want to diminish it
I like innovative thinking solving things ,like to communicate with others like minded,like to be part of your group.
Tuning the analogue monolithic printed circuit is going to be interesting to manage with this method and increasing complexity I expect – can’t swap out a resistor (etc) for a better value without reprinting the whole thing. But darn if that isn’t a fun and effective little option. So I’d suggest if you want to go further with this dialling up the complexity of air powered logic you probably need to add in some thin tube resistors between elements so you can dial in the circuit by adding length or pinching the tube more closed.
All very cool, there is a limitation using only vacumm pressure to drive the system but the “transistor” could easily be converted to operating with compressed air; the gate side forcing the silicon against the valve instead of away from it…inverting the logic. I wonder where he got his silicon sheet from? Dental damm, or did he cast it?
Definitely smaller than a century ago when a dual 4 bit digital to analog converter took up much more than a cubic foot, that’s the Duo-Art piano reproducer 1913 patent. There was another with a power amplifier servo over vacuum level.
This is a very interesting article – thank you for sharing it.