There’s a long history of devices originally used for communication being made into computers, with relay switching circuits, vacuum tubes, and transistors being some well-known examples. In a smaller way, pneumatic tubes likewise deserve a place on the list; [soiboi soft], for example, has used pneumatic systems to build actuators, logic systems, and displays, including this latching seven-segment display.
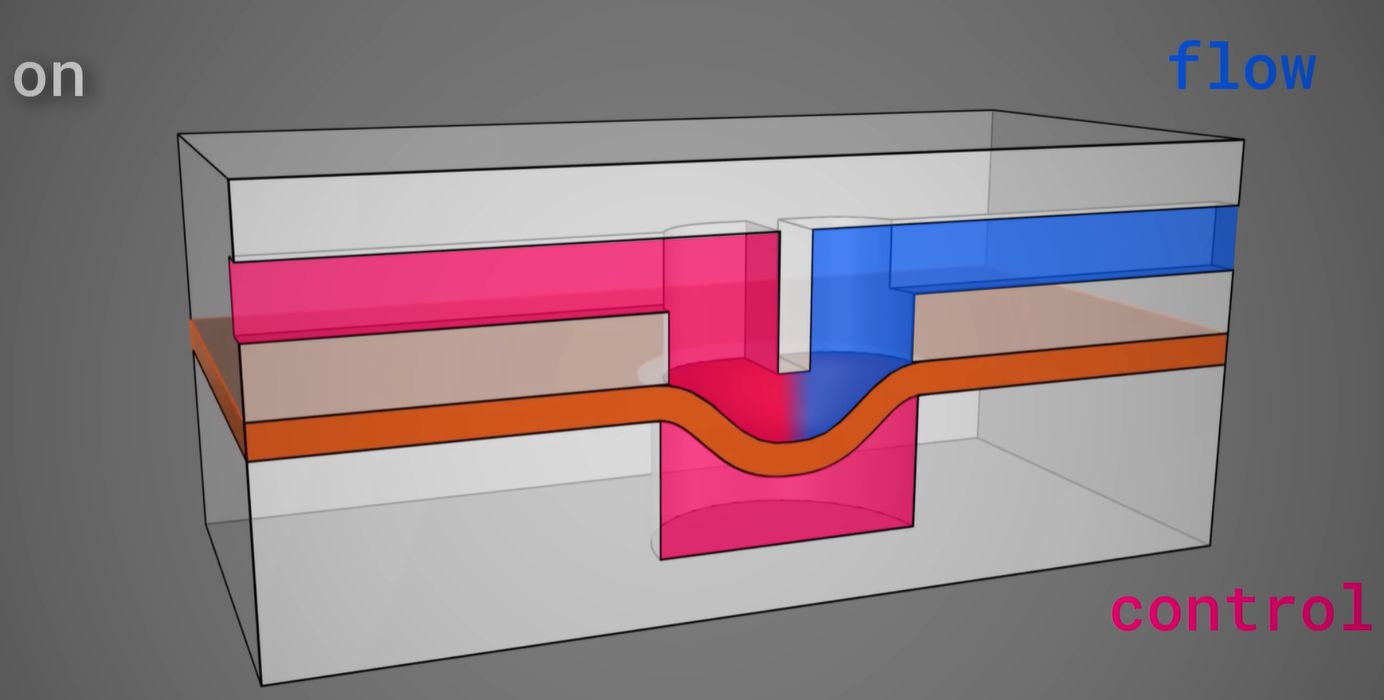
Each segment in the display is made of a cavity behind a silicone sheet; when a vacuum is applied, the front sheet is pulled into the cavity. A vacuum-controlled switch (much like a transistor, as we’ve covered before) connects to the cavity, so that each segment can be latched open or closed. Each segment has two control lines: one to pressurize or depressurize the cavity, and one to control the switch. The overall display has four seven-segment digits, with seven common data lines and four control lines, one for each digit.
The display is built in five layers: the front display membrane, a frame to clamp this in place, the chamber bodies, the membrane which forms the switches, and the control channels. The membranes were cast in silicone using 3D-printed molds, and the other parts were 3D-printed on a glass build plate to get a sufficiently smooth, leak-free surface. As it was, the display used a truly intimidating number of fasteners to ensure airtight connections between the different layers. [soiboi soft] used the display for a clock, so it sits at the front of a 3D-printed enclosure containing an Arduino, a small vacuum pump, and solenoid valves.
This capacity for latching and switching, combined with pneumatic actuators, raises the interesting possibility of purely air-powered robots. It’s even possible to 3D-print pneumatic channels by using a custom nozzle.
Thanks to [Norbert Mezei] for the tip!