
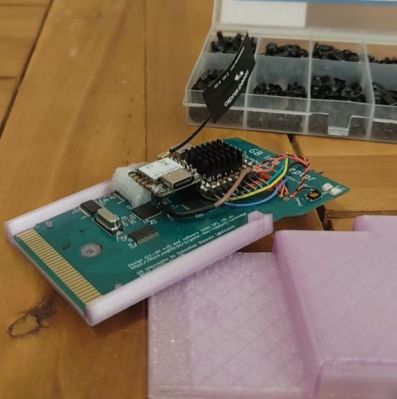
Some of us have felt somewhat nervous about the collapse of DRAM and NAND Flash memory supply in the consumer market, while others seem to have fully embraced it. Someone like [polymatt] for example, whose recent project entails a USB drive that skips back quite a few decades and opts to use a glorious 64-bit core memory device for storage.
To really embrace the DIY spirit here, the PCBs were milled using a small CNC router before the core memory was assembled alongside the other components, including apparently L293 H-bridge ICs as the drivers, along with an ESP32 module for the brains and USB interface.
Much like NAND Flash, core memory relies on sensing the state of a cell through a destructive read action, which thus requires a fair bit of surrounding logic to set up read and writes, parse sense line values and restore any read value after said destructive read. Determining the right voltage to use during read and write actions is essential, and here determined experimentally.
The final build contains two PCBs inside an enclosure that’s filled with silicone oil. Other than looking cool through the acrylic window, it also helps to keep the individual cores at a fairly consistent temperature, which is helpful with reliable bit flipping, even if it’s probably overkill here.
Ignoring for a moment that just the memory required for the USB stack in the ESP32 module is many times the size of this core memory device, it’s still a very cool project whose appeal goes far beyond mere practicality.

 In the world of scientific publishing there are many reasons why a paper can be retracted, but generally there is an obvious and clearly communicated reason for doing so. Thus when [Yves Gingras] – a historian of physics – and [Mahdi Khelfaoui] – a colleague – noticed recently that two 1940s papers by [Max Planck] had been quite recently retracted, this resulted in an eyebrow-raising double-take, before naturally
In the world of scientific publishing there are many reasons why a paper can be retracted, but generally there is an obvious and clearly communicated reason for doing so. Thus when [Yves Gingras] – a historian of physics – and [Mahdi Khelfaoui] – a colleague – noticed recently that two 1940s papers by [Max Planck] had been quite recently retracted, this resulted in an eyebrow-raising double-take, before naturally 

 There’s no questioning [Throaty Mumbo]’s uncanny skill at answering questions that nobody ever asked, such as whether it’s possible to watch YouTube videos on a Nintendo Game Boy Color handheld gaming system.
There’s no questioning [Throaty Mumbo]’s uncanny skill at answering questions that nobody ever asked, such as whether it’s possible to watch YouTube videos on a Nintendo Game Boy Color handheld gaming system.
 Recently [Bits und Bolts] found himself in a bit of a pickle, when on boot his PC would complain about a connected USB device drawing too much power, before shutting down again. After unplugging various USB devices, the problem was narrowed down to an Elgato Cam Link 4K video capture device.
Recently [Bits und Bolts] found himself in a bit of a pickle, when on boot his PC would complain about a connected USB device drawing too much power, before shutting down again. After unplugging various USB devices, the problem was narrowed down to an Elgato Cam Link 4K video capture device.

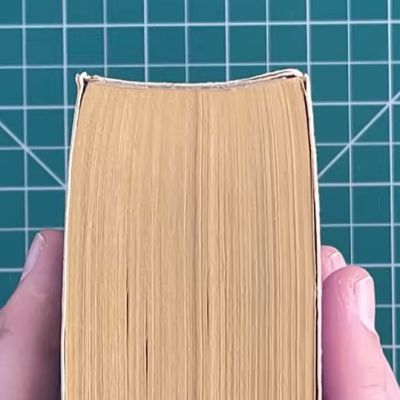 Although paperbacks are a much-loved aspect of the literary world, they are not really intended to last the decades the way that hardcover books are. Beyond the typical ravaged covers, paperbacks also tend to suffer from a warped spine, where the formally flat spine gets a definite inwards curve due to the ravages of moisture, temperature, failing glue and the passing of time in general. If this bothers you, then [Book Care Studio]
Although paperbacks are a much-loved aspect of the literary world, they are not really intended to last the decades the way that hardcover books are. Beyond the typical ravaged covers, paperbacks also tend to suffer from a warped spine, where the formally flat spine gets a definite inwards curve due to the ravages of moisture, temperature, failing glue and the passing of time in general. If this bothers you, then [Book Care Studio] 








