
When you’re issued safety glasses at the door, you know it’s going to be interesting. As promised, I’m checking out the FIRST robotics regional in Kansas City today. The competition is pretty fierce – not quite flame throwing battle bot action, but the kids have put together some pretty serious robots.
Read on for more pics from the competition.
Most of the bots share the same basic design features – mainly because each team is issued a kit of stock parts to start out with. I spent most of my time visiting the teams in the pits – checking out their designs and asking them what the favorite part of their bot was.
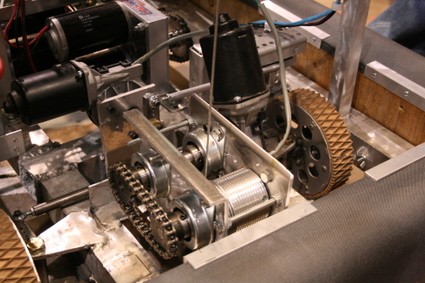
[Team 2385] – Wright Christian Academy was one of my first visits. They built their own high torque steering system (and winch drive) using some power door motors from a van. They look about the same as older windshield wiper motors. They added a linear potentiometer to the linkage to create their own super servo. I’ll probably re-create this on one of my future projects.

[Team 1996] came up with this interesting gripper for their bot. The arms lever up and down, but the gripper has a static chain drive to keep it level the entire time.

[Team 1108] built one of the most entertaining bots to watch compete. The arm is a catapult, but it’s tipped with a trash can lid with a hand sewn rubber seal. Just underneath is a fan assembly from a shop vac – but the AC electric motor was replaced with a DC unit. It did a fantastic job of picking up the giant ball – and launching it with the arm.

A while later I caught them tuning the catapult. It just launched the ball, just about nailing the guy standing directly in the path.

[Team 1775] put together this sweet control board for their bot. The controls are standard fare, but most of the teams settle for mounting them on a piece of wood.

[Team 1981] had to scrap their pneumatic arm at the last minute, so they settled for making their bot short and solid. Last time I checked, they managed to score pretty decently by just pushing the ball with their bot and making around the track as fast as they could.

For the autonomous round, one team needed a bit more range for their IR remote. Commands 1-3 tell the bot which slot is needed for the target ball. Sending a 4 kills everything. (off, not all humans.)
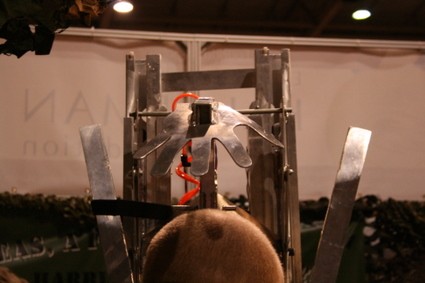
[Team 2164] built this aluminum hand shaped gripper. It looks fantastic, but I haven’t seen it in action yet, but it looks awesome.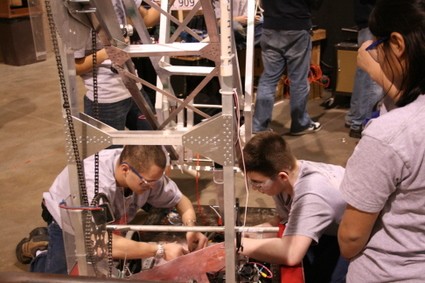
I liked this little construction trick. The frame is built by pop-riveting aluminum plates to join the structure. I’m not sure how durable it will be, but it looks like a nice way to speed up construction.
I didn’t get a chance to talk to every team I wanted to – they’ve all been working pretty hard. When they’re trying to solve a problem or get the bot ready to roll, you can’t miss the activity. If you get a chance to check out a FIRST competition, take advantage of it.















Awsome, can’t wait for NY/NJ Regionals.
FIRST is great! I’m a mentor for my daughter’s team (Team 2129) and we are going to the Milwaukee regionals next weekend.
Team 2129’s website is http://www.swrobotics.com/
It’s so much fun to watch and help the kids build these robots.
I’m the student drier for team 171 and I’ll be at the Milwaukee regionals next weekend
Looks great. I wish I could participate… I’ve always wanted to do something like that.
The control board looks cool. What would be cooler is an office chair without casters with joysticks mounted on the armrests.
And short and sturdy is almost always good.
where in Kc is this being held? i live right outside the city and would love to check it out. oh, and the Autoshow this weekend in Bartle hall. (new cars)
Hey Will, it was great meeting you, and thanks for the sticker.
AARON – the competition is being held at Hale Arena. Tomorrow is the final day for competitions, and the awards will be handed out as well Saturday
You should come to Las Vegas and watch one of the first DODDEA international schools compete on march 27, 28, 29
I’m also from team 2037 the international team:D:D
I saw this and just about freaked out. I’m from Wright Christian. It was great meeting you will, and thanks for the shirt/stickers. My sticker’s going on my new Macbook Pro when it arrives.
FIRST Robotics IS and amazing organization. To aaron, we’re at the hale arena. Finals are tomorrow after 1 or so.
Will, you should’ve at least linked to F.I.R.S.T.’s site: http://www.usfirst.org/
By the way, I’m co-captain of Team 1884, The Griffins. We’re based in London, but this year we’re heading to Orlando (the Florida regional is next week).
It’s great to see FRC in “mainstream” media!
I was in robotics one year. the one guy rejected all of neil’s ideas. at competition all of the other robots had neil’s ideas. we got 49 out of 50. And i didnt get to do much design wise as a programmer. it was a good learning experience though.
Sucks that we had to scrap the arm at the last minute (Team 1981 was/is the team I’m on). I saw you out in the lobby with your laptop, but I’m like… Well, basically a mute in person, so I didnt’ really say anything and it would have been pretty creepy to just got up to you and stand there like some freaky stalker or something. I still find it funny how they said nothing about our robot, but kept commenting our “Greatful Dead inspired shirts” during the competition rounds lol.
when i was with Cybersonics http://www.cybersonics.org team 103, we always had a blast with these competitions. glad to see other people are into it as well. i just wish they could create teams in colleges or something and have different, possibly more complex challenges. until then, i guess i will keep volunteering with the youth!
I just got home from the regional competition at RIT in new york.
team 1733 mentor here, if anyone is going to the CT regional say hi, look for the guy with blue hair.
Yeah, the NY regional has been great so far
w00t team 675 alumni…FIRST robotics is awesome. Wish I could still be on the team…I’ll have to start one here.
i’m in the competion also but in the Israeli Reginals. I’d love to see hack a day here. good luck to all at the different reginals.
check out our robot (go to the gallery):
http://www.hamosadrobotics.net/
I’m with team 1248, at the Buckeye Regionals in a couple of weeks.
We took first year robot and mounted a chair on it. Now we can ride it around (drains the battery a lot, though).
im the photographer/electrical guy from team 1418. we will be at the annapolis reagonals a week from now, but today, the team is gathering to watch a simulcast of an event today. great pix btw!
I can’t believe I was there both days and missed a chance to talk. My team is competing in the Minnesota Regional later this month. FIRST is one of the few programs in high schools that gets kids who wouldn’t be interested otherwise into robotics.
just got back from the richmond FRC
Loads of fun
this was my first year doin anything like this
our team, 1895, got 38 out of 65
not horrible but not great
next week we go to annapolis
~jboll3
nice color pictures. You’re right. Black and white works with the web site better
Think PINK
it is really cool ,also we having our competition next week in malaysia,whoever will qualified will go for the main one in india….
Hi, I’m a member of Team 2002, we just had our first regional (Oregon) and will be heading up to seattle for round two in a coupple of weeks.
If you’ve never been to a FIRST competition, YOU HAVE NOT EXPERIENCED LIFE!!!
it’s the most insane crazy and totally awesome competition ever created.
i’m not sure if anyone had yet pointed out:
A- the KOP (kit of parts) includes everything except what you need to build the bot
B- teams have 6 weeks (and not a nanosecond more) to build their bot (regulated by strict shipping dates)
C- teams have to fundraise for all the money we spend (most teams need about 20 grand for a build season)
D- the biggest thing about FIEST is not robots, it’s Gracious Proffesionalism (be kind, respectful, helpful)
First is Awesome, and even though i barely got more than 4 hours of sleep at night during build season, i don’t think i’d be the same person i am today without FIRST.
check out my team’s website (i made it) http://www.frcteam2002.com
-Z
Too bad the KC Star couldnt even print the results in the paper. It was a wonderful contest, one of the most fun high school contests I have ever attended. I don’t think those guys understand that the students at this regional are gonna be the ones who run our industry and our technology in the next ten years. I think all of us (I mean the non-scientific types) need to be paying more attention here. Our grandson will be attending SMEast in about 10 years, and he cannot wait to get involved.
damnit… really, really, reallyreallyreally wish i’d known this was happening- I live in KC and definitely have an interest in robotics…
Will, are you from the KC area or just visiting?
I was on the Rockhurst High School FIRST team a few years ago, and it was a pretty good experience, i’d recommend it to anyone!
hey, I was amazed when i saw this, I am going to compete in two weeks with my highschool in the buckeye regional. If anyone wants to know any info emial me at hatter_The@yahoo.com
thanks,
sam
student driver from 341 here (Philadelphia, PA), always glad to see more people discovering/promoting FIRST. if you have a chance, you should definitely look into attending the championship event in Atlanta, GA in April (4/17 – 4/19).
FIRST is great, I remember being in it when I was in high school. Hoping to mentor sometime in the future. Go cobras!
Theyre right you do have great pictures.
These competitions are really fun, they make me realize why other people like sports.
Our team, 1165, participated in the Phoenix, AZ regionals……AND WON!!!
Along with teams 39 and 60, were going to the Nationals in Atlanta next month XD.
Came here a little late, but those are some great pictures of the regional you have there! What kind of camera did you use? My Canon PowerShot SD750 had trouble getting clear shots of the moving robots from the stands in Milwaukee.
Oh yeah, I’m the webmaster for Team 2129 (and one of the photographers).
Glad to see this write up on hack a day!
I’m a mentor for the Canton Ohio team 1386 TROBOTS ( http://www.trobots.com )
FIRST is an incredible organization for inspiring technical and engineering students!
We did compete in the Buckeye (Cleveland Ohio) regional and was extremely fortunate to qualify for the championships in Atlanta held April 17-19 !
If you’re in the area, make it to ATL and see the BEST OF THE BEST!
I was a part of team 2366 at that tournament. It was a fun time, and had I known a person from Hackaday was there, I would have worked twice as hard to win…
GO FIRST!!!!
I am a student programer on a first team and I must say, next years new control system looks sweet, I can’t wait.
Which teams from KC region attended the Atlanta games?
I was a part of team 233 The Pink Team. Pink has been around since 1997 and I’m happy to have been a part of it. Webmaster and Animation Master for 4 years (my entire time in high school) and it was the best experience of my life. FIRST has done nothing but good for the world’s communities.
Those of you with the robo know-how (and on hack-a-day that shouldn’t be too uncommon) should give to your society and found a team at a school near you. Spread the joy.
Great quality stuff.
Have been waiting for this kinda stuff for years