[Jim] loves gyros – not those newfangled MEMS devices, but old-fashioned mechanical gyroscopes. His obsession has pushed him to build this gyro stabilized two wheeler. We love watching hacks come together from simple basic materials and hand tools, with liberal amounts of hot glue to hold everything in place. That seems to be [Jim’s] philosophy as well.
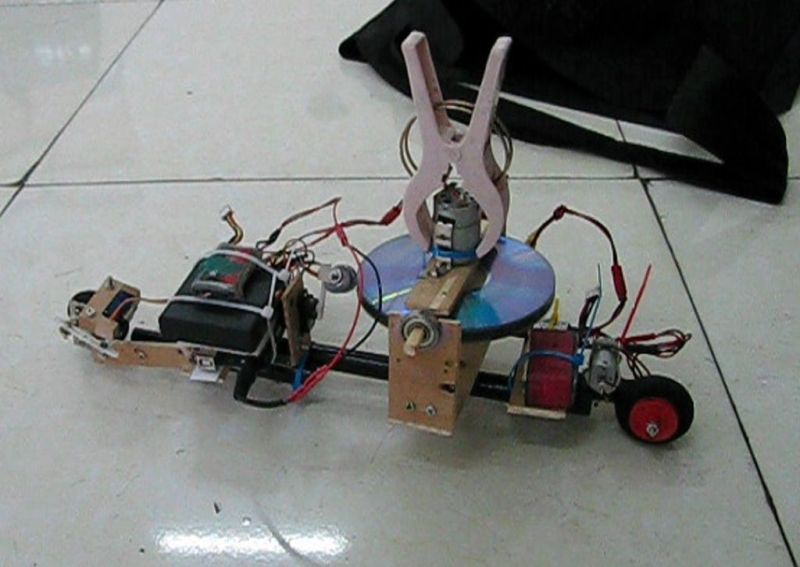
This is actually the fifth incarnation of [Jim’s] design. Along the way he’s learned a few important secrets about mechanical gyro design, such as balancing the motor and gyro assembly to be just a bit top-heavy. [Jim’s] gyro is a stack of CDs directly mounted to the shaft of a brushed speed400 R/C airplane motor. The motor spins the CDs up at breakneck speed – literally. [Jim] mentions that they’ve exploded during some of his early experiments.
The gyroscope is free to move in the fore-aft direction. Side to side balance tilting is on the wheels themselves. The wheels are model airplane wheels, which have a curved tread. No cheating by using flat LEGO wheels in [Jim’s] lab! A potentiometer measures the tilt angle of the gyro. The voltage from the pot is fed into an Arduino Uno which closes the loop by moving a servo mounted counterweight.
The vehicle is controlled with a regular R/C plane radio. A servo steers the front wheel while another DC motor drives the rear wheel. Not only is [Jim’s] creation able to balance on its own, it can even make a U-Turn within a hallway.














now thats cool
Love this kind of “kitchen table” kind of engineering…
I think the reason for the necessarity of a slightly heavier top than bottom, lies in the friction of the shaft. If you place the center of mass above it it results in an unstable position of the gyro i.e. it needs no friction moment to overcome to move.
With more ideal bearings that distance should be reduced or get even zero (as visible in this great gyro teardown http://youtu.be/AO7pn3uiWA0 ).
very cool! makes me want to do this on a larger scale!
[Jim] loves gyros – not those delicious, perfectly roasted sandwiches, but old-fashioned mechanical gyroscopes.
Corrected to reflect my hunger.
I love the word “gyros” -or the turkisch correspondent “döner” (same dish)- for actually describing the way it is made. Rotating beef on a stick, only the angular velocity is decreased :)
damn you! Now I have to go out and find some. Huuunggrrry
I know, so hungry now, off to get a gyro!
Now I wish the lamb rotator spun as fast as a gyroscope.
Compare the Brennan Gyro-Monorail, which did the same thing on a much larger scale:
http://www.douglas-self.com/MUSEUM/LOCOLOCO/brennan/brennan.htm
Appropriate for the hundredth anniversary of the Shilovsky Gyrocar: http://en.wikipedia.org/wiki/Gyrocar
The gyro tilts fore-aft to generate port-starboard torque because of gyroscopic precession.
http://en.wikipedia.org/wiki/Precession
Thanks Adam for the great write-up. You nailed all the details.
For more information about this project see LetsMakeRobots.com – http://letsmakerobots.com/content/gyro-stabilized-two-wheeler-v5-steering
Planned mods to my gyro car: heavier rotor/motor so not so tippy going around corners, servo/actuator to catch and restore rotor when it tumbles, another pot on the steering to control rotor when turning.
Also, see my precession robot at LMR based on the work of John W. Jameson’s Walking Gyro.
Jim.
thats just a delight to watch!!!
Thanks so much! It is really thrilling to see it balance, never get tired of it. So much more could be done.
Hi, I’m a student from the IB program, and I’m doing my extended essay about gyroscopic stabilization.
I’m taking your simplest “gyrocar” example (the second video, in this page) to build mine, so I can get data of the stabilization. My essay is undetermined jet, but the main idea is, based on your gyrocar, see the relation between the number of gyroscopes (and the speed of those) with the stability of the car.
I’ve been doing a research about gyroscopic effect, trying to find theoretical explanations that relate those parameters mathematically, but I havent found nothing that I could use.
I would like to know if you have any theoretical foundation about gyroscopic stabilization, gyrocar, or anything related. Also, it would be great to know your opinion about my essay. (if you want full information about my experiment i would be delighted to do it.)
Please contact me: elenitamoon2000@gmail.com I would be more than pleased to hear from you.
Thank you.