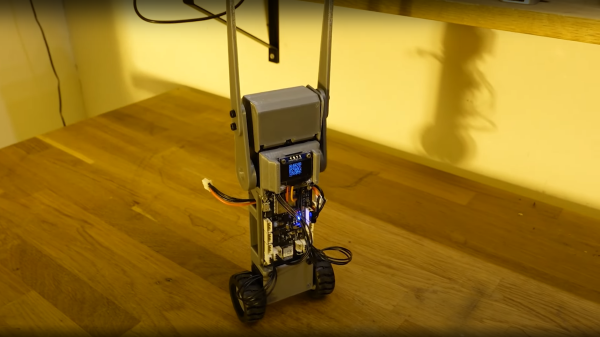
Norwegian electronics hacker [Hans Jørgen] aka [time expander] on YouTube, has a clear interest in robotics, and for his latest effort, decided that it was time to build a custom controller platform. Since [Hans] had a pile of Dynamixel servo motors lying around to test it with, a good first project for the platform was a simple self-balancing wheeled robot. (Video, embedded below)
We say ‘simple’ but that isn’t really the case, as there is a fair bit going on to get this to work. The first problem, is sensing, which was quickly solved with the excellent BMO055 IMU chip. Next, what to do when it falls over? Simply adding some servo-controlled arms, allowed the robot to flip itself back upright. Control is covered with a ESP32-WROOM-32D module from our friends at Espressif, which enables remote firmware uploading over the air (OTA update) as well as parameter tuning. In order to implement the latter, [Hans] chose to use bonjour/mDNS which is an implementation of zero-configuration networking. This gets the ESP32 onto the WiFi, but it isn’t immediately obvious how to connect to it, without a little digging around. To simply connection, [Hans] implemented a dynamic QR code via the connected OLED. This is just one of the those tiny 0.96″ displays that you see touted all over our corners of the internet.
Simply by scanning the QR code with any compatible device to hand brings up a simple configuration web page, allowing one to tweak the PID controller parameters, and get that balancing robot into check. Great stuff!
The PCB was designed in Eagle, firmware for the ESP32 is available, 3D models for the plastic are designed with fusion 360, and [Hans] is even currently working on some preliminary Alexa integration. What a fun project!
All the above, albeit an early cut (look out for bugs!) is available on the project GitHub for your viewing pleasure.
We’re no stranger to self-balancing 3D-printed bots, whilst you’re here, why not checkout A problematic Self-Balancing Sonic the Hedgehog? If wheeled bots aren’t your cup-of-tea, there’s a not-at-all freaky one-legged bouncing bot that may be of interest.
Continue reading “A Self Righting Balancing Robot Configured The Easy Way”