In the world of drones, quadcopters, and unmanned aerial vehicles, the community has pretty much settled on AVR microcontrollers for the low end, and ARM for the high performance boards. If the FAA doesn’t screw things up, there will soon be another market that requires even more computational power, and Navio, the autopilot shield for the Pi, is just the thing for it.
Where high end multicopter and autopilot boards like the OpenPilot Revolution use ARM micros, there’s a small but demanding segment of the hobby that needs even more processing power. Think of something like the Outback Challenge, where fixed-wing drones search the desert for a lost mannequin autonomously. You’re going to need OpenCV for that, and that means Linux.
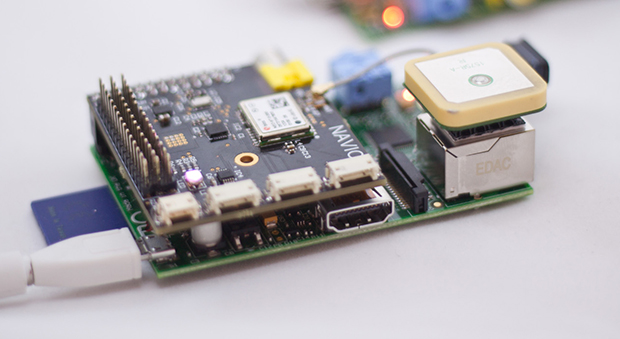
Navio is a shield for the Raspberry Pi, complete with a barometric pressure sensor, gyros, accelerometer, and compass, and GPS. It’s designed to run a more real-time version of Linux, and has the ability to do some interesting telemetry configurations – putting a 3G modem on the Navio isn’t much of a problem, and since it’s a Raspi, doing image processing of a downward facing camera is just a matter of writing the code.
The Navio team is currently running an Indiegogo campaign, with the baseline version available for $145. That’s pretty close to the price of the OpenPilot Revolution. There’s also a version upgraded with the U-blox NEO-6T that allows for on-board processing of raw GPS data.















The FAA has a huge challenge, they need to get it right the first time. If they screw it up, and a UAS and a passenger aircraft have an issue, where people get hurt, there will be no more UAS allowed! Of course, the UAS industries are clamoring for changes now. Claims of huge employment are dubious, since it will only transition pilots and maintenance from manned aircraft to unmanned (peopled, what is the right non-gender word).
If people think everything under 400ft (1000ft, 2000ft, whatever) should be uncontrolled, what happens when a traffic accident occurs, and a medical helicopter has to thread it’s way through 5 local TV stations with their quad copters filming the carnage?
Quad copters and other UAS devices are easy to fly when the weather is nice and there is little wind and turbulence. What happens when there is turbulence, or dust or other weather that makes visual queues, and control difficult. How about a slightly damaged older device that isn’t well maintained, and the operator is inexperienced. The innocent people on the sidewalk should expect a reasonable amount of safety near these devices.
There will need to be right of way rules, and maintenance programs, and all kinds of other regulations that most people haven’t considered. The FAA could mess all this up and not regulate it properly, and people will get hurt. They could rush, or some manufacturer could lobby congress to get the FAA out of the way, and people would get hurt, and then you want to see congress act!
Everyone needs to be a little more patient, and let the process work it’s way out.
In regards to your argument saying it will only transition regular pilots and maintenance to unmanned aviation-not true.
I am a general aviation aircraft mechanic, and that market will not be affected in the slightest by UAS legislation (with the sole exceptions of things like pipeline inspection and aerial photography). The people themselves are not going to transition over, the skillset is very different. I also happen to have my personal UAS sitting nearby on my workbench, and I can tell you that it does not look, fly or maintain like a Cessna.
But in regards to your discussion on the legislation itself, you could not be more accurate. The FAA has a golden opportunity to allow a new niche in aviation, without it becoming the Wild West. So far, the “no commercial use” clause has prevented this, but Trappy’s legal case may send that in the direction of no return.
Thus far, the hobby UAS community (most of us refer to it as FPV) has been self-regulating, we take many precautions to avoid hurting people or property (you also have to consider that these aircraft cost thousands of dollars of our own money and we also don’t want to damage them), and I have yet to hear of someone getting seriously hurt by one, but once companies come along to use them (which is not necessarily a bad thing) for commercial purposes, the self-regulation is out the window.
I love this product and it is great for the entire community. However I do disagree with the whole FAA messing things up comment. While I do believe we should have the ability to fly quad/hex/octi and other unmanned vehicles i personally do not see a problem with them stepping in. All to often anymore I see people with stuffed wallets and an slr believe that is all they need. When you think about the weight of an slr on one of these falling out of the sky ,it has already happened http://www.wtop.com/41/3432477/Drone-crashes-into-crowd-during-Va-running-of-the-bulls-event and will continue to happen something needs to be put in place.
back to the product, this is a sweet project, personally I would love to see it gathering lots of data in fields to see if greater yields can be obtained through almost a micromanagement of a larger farm with sensors throughout.
Very cool.
Regarding the FAA and and the perception of the public at large, I’d like to make a friendly proposal that we all stop using the word, “drone,” when what we’re really talking about is a multicopter. “Drone” has a very bad association, even if you have no beef with the military uses of them. Even its other definitions are negative: useless drone bees, “droning on and on,” etc. If we avoid the “D” word, there’s no reason for the uninformed to associate our cool stuff with the nefarious. I’d like both the FAA and my neighbors to think I’m doing nothing more dangerous or invasive than flying an R/C airplane or launching a model rocket (note: we don’t call them “dive bombers” or “missiles”)
Frankly, I feel the same way about the negative connotations of “hacker.” I know, sorry to offend, but “maker” is so much more positive and friendly than those “hack” into our banks and eBay accounts. In the case of Hackaday, I don’t know what you’d do. “Makeaday” doesn’t sound very good. Besides, you have name recognition.
Well, I thought I’d just toss out that food for thought and see who finds it appetizing.
Todd
Why does a quadcopter need composite and HDMI outputs?
Beat me to it.
When talking UAVs, ounces are ounces.
There are PLENTY of low cost, high performance Linux SBCs that could do the job. Some perhaps better than the pi.
Beaglebone seems a better target for this. Loads of pins for the UAV. Linux. No unnecessary/not useful for this application connectors. BBBlack DOES have them but still would be my choice for other reasons.
Anyone know the weight specs of pi vs BBBlack? Maybe BB is heavier.
Maybe one of the smaller Atmel SAM SoC module would be a good match. At least with the Pi you could have a cheap camera if you need it.
it isn’t always better for that particular job. here it is probably a large number of factors involved. Cost of BBBlack vs Pi, availability, Dev community, etc….. The Pi has a very established community now i’m not saying the BBBlack does not have a large dev community but I would say it is significantly smaller than the Pi.
as for weight from a quick search (if these are wrong sorry) i’m finding bbb=37g pi=45g yes there is a difference but IMHO 8 grams or ~.3 oz really is not a decision maker.
Another posted asked why would it need composite or hdmi output, actually this could be especially useful if gathering data. instead of having to plug it in or access via network cable if i could just plug my quadcopter controller into a monitor and access the data gathered or telemetry I can honestly say that would be a nice addiction.
I’d go along with you on that except:
1: Beaglebone black has more available useful (not just prototyping breakouts) capes if that is your metric for community robustness. But yes, people numbers, pi wins.
2: not only us BBB a faster CPU in terms of MHz, it is newer architecture with more supported Linux distros. Already many distros are ceasing support for the chip set pi runs on. In terms of speed, when both are at the same MHz, BBB runs more than 1.5x MIPS more than pi.
3: it not terribly much more than the pi, and comes Linux installed no SD card necessary.
If anything, pi’s advantage is the video core processor. Which was closed source until recently. But with a bit of work, it MIGHT be coaxed into lending openXV a hand(?)
You can’t get your hands on a Beagle Bone Black, but I can go down to my local store and get a Pi directly. The BBB is backlogged everywhere, and then you have to find the Pix Hawk
I would much rather have a Beagle Bone see: http://www.dronetrest.com/t/pixhawk-fire-cape/194
My source:
http://makezine.com/magazine/how-to-choose-the-right-platform-raspberry-pi-or-beaglebone-black/
Also a factor to consider: form factor/layout. The pi is terrible in both the mounting and gpio connector departments.
BBB has big mounting holes on rectangular spacing. Pi requires complex board clips to get anything more than marginal mounting.
The pi is expansion headers, LCD and camera flex connectors are not in convenient places if you want to use all three. Worse the expansion header being a single dual row header means any board plugged in flops around with one unsupported side. Worse still, real careful layout of your board is required to assure nothing can short when your board slaps the tall network connector shroud.
BBB’s headers are on opposite sides meaning capes are fully supported on both sides and end to end. Very securely fit.
Overall, I like the concept of pi and the community built, but remain dissapointed in the hardware execution.
there are 2 mounting screw holes onboard a pi, you tend to find alot of pi expansion shields keep these screwholes. You can stick a motherboard spacer between the pi and expansion, plus you can of course use a motherboard spacer underneath the pi too. This shield preserves 1 of the screwholes, it doesnt cover the other hole so doesnt require it.
I do agree its much simpler on the BBB of course. No need for any screws at all.
What about the upcoming Raspberry Pi embedded module?
True. Pi embedded would be a good fit here.
Yanno, for some reason I thought the rPI was an ARM powered board. Silly me.
Arm 6, “and some secret sauce”
6 is at the end of shelf life for most full featured Linux distros (ubunto for ex has ended support).
Now that the navspark is shipping (a mini dev board with a 100MHz SPARC CPU, programable from the Arduino IDE) for $30, you can add a 10DOF inertial sensor module and motor controllers for far less than the asking price.
OpenCV works on bare metal btw, linux is not really required.
rpi means you can have FULLHD FPV experience on your drone (streaming over wifi)
The only real compelling reason for pi actually.. but again, possible with many other SBCs.
Do you have a reasonably reliable solution for that? I tried, but got some ten seconds of video before pi or mplayer crashed every time :(
there is a threat on rpi forum, lag is < 500ms
One thing this is missing, a chip to overlay the RasPi video over camera video keyed on black so that you can easily put some of that data over the view you get from the drone.
Holy god the prices on their indiegogo campaign are insanity.
No way. 5x the price of the pi itself?!? What golden item am I not seeing thats worth thatmuch? Is GPS receiver included?
Doesn’t seem like a terrible price. Buying all the sensors/servo outputs separately in I2C breakout form is probably going to come to just about the same price. I know I spent at least $100 or so on sensor/servo breakouts. Save for the GPS & Barometer since my project really doesn’t need either. Both of which would easily run another $50-70+
I was sorta surprised it doesn’t have a built in magnetometer but its probably getting its compass headings from the GPS.
That’s a correct point – the summary cost of all those sensors on breakouts is the same (or even more), but using them would turn into a mess of wires.
Navio does have a compass – it is built-in in MPU9250.
I really wish this had been a thing when I started my RasPi project. As it stands I already have all those sensors (give or take) laying around in I2C form. Still would have been nice to have been able to have them all in one board but I’m not building a UAV so weight isn’t super critical :P
So you need Linux to use opencv? Where did you go to school?
Just a note, I looked at the OpenPilot project a month or so ago. It seems that most of the developers left (or were driven out) of the OpenPilot project and forked the code into their own project http://taulabs.org
Looking at the Tau Labs github page, the project seems to be under very active development. A lot of very intelligent discussion going on in their forums. Might be worth checking out if you are looking to get into autopilots and UAV.