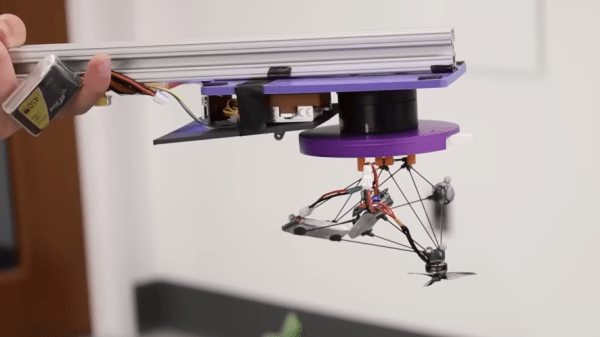
Researchers demonstrate that something interesting happens when a small drone with a spindly airframe spins at a high speed: it very nearly turns invisible. The spidery device is shown mounted in its launcher in the image above. The dark blur at the rightmost side is an outlet on the wall behind the drone, not motion blur from a moving part.
There’s not much to do about the noise, but a high-speed spin becomes nearly invisible.
There’s not a lot of detail about the Phantom Twist’s hardware design but it appears to use a downward-angled motor for lift, relying on a high-speed control system to maneuver and maintain altitude.
This does away with the need for a wing, at the cost of only being stable while rotating at a high speed. We imagine it is also a touchy design that depends greatly on being balanced just so.
A hand launcher spins the device up before releasing it for flight. The visual effect once it is up and running is pretty striking; see for yourself in the short video, embedded just below.
Last September, Denmark was gripped by a spate of drone sightings near airports. It’s familiar territory for Hackaday, as we reported on a similar drone panic saga at British airports back in the last decade. Back then the British police dragged their feet and hid behind secrecy laws for years to avoid admitting they overreacted, but it seems in Denmark they do things differently (Danish language, Google Translate link.).
The Danish police in Jutland have rolled back their report, and noted that a reported observation alone is not enough to confirm a drone was present. It’s not confirmed why they’ve taken this step, but we’ve been told that there’s been an effort within the drone community to identify possible aircraft flight paths which could have resulted in a false drone sighting at the times in question.
We welcome this correction, and hope that its important message travels widely. Of course it is the right thing to do for a police force to take drone reports seriously, but overreacting as the British police did is of little help. We commend the Danish police for taking this step, and we’re likely to trust any drone reports from them a little bit more in the future. If you’d like to read our plea for a sensible response at the time, it’s here.
You have to be a pretty big aviation nerd to know about [Willard Ray Custer] and his channel wing concept, but if you are, you’ll be giddy to hear about the semicircular profile of the HopFlyt Cyclone drone’s tandem wings. If you’re not quite that much of a nerd, please keep reading, because it’s a really neat concept that never — er — quite got off the ground.
[Custer]’s idea was pretty simple, and born of a shift in reference frame — he realized that only the relative wind over the wing mattered, not the airspeed of the entire aircraft. The same idea drives every blown-wing short-takeoff-and-landing (STOL) project from the DHC-7 turboprop airliner to the An-72 cargo jet: air from the engines washes over the wings, creating lift. Where [Custer] went further is that rather than blowing air over a straight wing, he wrapped the wing under the propeller in a semicircle to maximize the area of lower pressure — and thus lift — creating the “channel wing” that bears his name.
Theoretically, an aircraft with channel wings and powerful enough engines might be able to do vertical takeoffs just from the blown lift, but none of [Custer]’s prototypes demonstrated that — just excellent short-field capability. The HopFlyt drone would be the same, except that, being a tandem, it has double the channel wings of [Custer]’s more-conventional designs, and it’s also a tilt-wing to boot. In that mode, the added low-speed lift from the channel wing makes transitions easier than they otherwise would be — which isn’t anything to sneeze at, since transitioning from vertical to horizontal flight has always been the real bane of VTOL projects.
They’re claiming a reduced fuel burn of 10% in hover and transition thanks to the extra lift from the channel wings. You can see their prototype in action in the demo video embedded below. We once featured a project that went even further, blowing air across a special hollow wing for propulsion and blown lift. The easiest eVTOL project still starts with a quadcopter, though.
Quadcopters tend to have very poor efficency because of their high disk loading. High disk loading– that is, how much weight each square meter of area swept by the propellers must carry–is almost unavoidable with conventinal quadcopters, which are controlled by throttling the four props. Make the propellers too big, and their inertia slows down that control loop, leading to stability problems. [rctestflight] had an idea to solve this, by borrowing a technology from the world of fixed-wing aviation: variable-pitch propellers.
In aircraft use, they are not new, dating back to the end of the first world war. They’re made for everything from the largest turboprops to the 75 kW(100 HP) Rotax 912. By varying the propeller pitch, you can keep the engine turning in its ideal RPM range but still vary thrust by taking a larger or shallower ‘bite’ out of the air with each sweep of the prop. You can probably see how this applies to the quadcopter: a well-designed pitch-change mechanism is going to be much quicker than throttling a big prop with lots of rotational inertia. That’s the theory.
To test it, [rctestflight] builds some large 3D-printed variable pitch props, hooks them up to regular drone motors via a belt drive, before going on–you guessed it–an RC test flight. To make that work, he’s got the pitch servo being driven from what should be the flight controller’s thrust output to each motor. Aside from the vibrations from imperfect balance on the 3D-printed props, it flies quite well– and much better with pitch control than trying to vary the RPMs of those heavy props. He’s even able to reverse the propeller pitch, making this perhaps the first quadcopter capable of autorotation. Well, almost, given that it lost control and came apart when he cut the throttle.
There are plenty of drones (and other gadgets) you can buy online that use proprietary control protocols. Of course, reverse-engineering one of these protocols is a hacker community classic. Today, [Zac Turner] shows us how this GPS drone can be autonomously controlled by a simple Arduino program or Python script.
What started as [Zac] sniffing some UDP packets quickly evolved into him decompiling the Android app to figure out what’s going on inside. He talks about how the launch command needs accurate GPS, how there’s several hidden features not used by the Android app, et cetera. And it’s not like it’s just another Linux SoC in there, either. No, there’s a proper Real-Time Operating System (RTOS) running, with a shell and a telnet interface. The list of small curiosities goes on.
After he finished reverse-engineering the protocol, he built some Python scripts, through which you can see the camera feed and control the drone remotely. He also went on to make an Arduino program that can do the latter using an Arduino Nano 33 IoT.
We don’t usually speculate on the true identity of the hackers behind these projects, but when [TN666]’s accoustic drone-detector crossed our desk with the name “Batear”, we couldn’t help but wonder– is that you, Bruce? On the other hand, with a BOM consisting entirely of one ESP32-S3 and an ICS-43434 I2S microphone, this isn’t exactly going to require the Wayne fortune to pull off. Indeed, [TN666] estimates a project cost of only 15 USD, which really democratizes drone detection.
It’s not a tuba– Imperial Japanese aircraft detector being demonstrated in 1932. Image Public Domain via rarehistoricalphotos.com
The key is what you might call ‘retrovation’– innovation by looking backwards. Most drone detection schema are looking to the ways we search for larger aircraft, and use RADAR. Before RADAR there were acoustic detectors, like the famous Japanese “war tubas” that went viral many years ago. RADAR modules aren’t cheap, but MEMS microphones are– and drones, especially quad-copters, aren’t exactly quiet. [TN666] thus made the choice to use acoustic detection in order to democratize drone detection.
Of course that’s not much good if the ESP32 is phoning home to some Azure or AWS server to get the acoustic data processed by some giant machine learning model. That would be the easy thing to do with an ESP32, but if you’re under drone attack or surveillance it’s not likely you want to rely on the cloud. There are always privacy concerns with using other people’s hardware, too. [TN666] again reached backwards to a more traditional algorithmic approach– specifically Goertzel filters to detect the acoustic frequencies used by drones. For analyzing specific frequency buckets, the Goertzel algorithm is as light as they come– which means everything can run local on the ESP32. They call that “edge computing” these days, but we just call it common sense.
The downside is that, since we’re just listening at specific frequencies, environmental noise can be an issue. Calibration for a given environment is suggested, as is a foam sock on the microphone to avoid false positives due to wind noise. It occurs to us the sort physical amplifier used in those ‘war tubas’ would both shelter the microphone from wind, as well as increase range and directionality.
[TN] does intend to explore machine learning models for this hardware as well; he seems to think that an ESP32-NN or small TensorFlow Lite model might outdo the Goertzel algorithm. He might be onto something, but we’re cheering for Goertzel on that one, simply on the basis that it’s a more elegant solution, one we’ve dived into before. It even works on the ATtiny85, which isn’t something you can say about even the lightest TensorFlow model.
Thanks to [TN] for the tip. Playboy billionaire or not, you can send your projects into the tips line to see them some bat-time on this bat-channel.
The final second prototype flying. (Credit: Luke Maximo Bell, YouTube)
The dream of fully powering everything from aircraft to cars on just the power generated from solar panels attached to the machine remains a tempting one, but always seems to require some serious engineering including putting the machine on a crash diet. The quadcopter that [Luke Maximo Bell] tried to fly off just solar power is a good case in point, as the first attempt crashed after three minutes and wrecked its solar panels. Now he’s back with a second attempt that ought to stay airborne for as long as the sun is shining.
Among the flaws with the first prototype were poor support for the very thin and fragile PV panels, requiring much better support on the carbon fiber frame of the drone. To support the very large solar array, the first drone’s arms were made to be very long, but this interfered with maneuvering, so the second version got trimmed down and the array raised above the frame. This saved 70 grams of weight from the shortened tubs, which could then be added to the new panel supports.
After an initial test flight resulted in a crash when the PV output dropped, the need for a small battery buffer was clear, so this was added, along with a reduction of the array to 4×7 panels to get the same 20V as the battery. The array also had to be reinforced, as the thin array was very wobbly in addition to making it impossible to fly with any significant wind.