You’ve got to walk before you can run, right? Perhaps not, if this bipedal dino-like running robot is any indication.
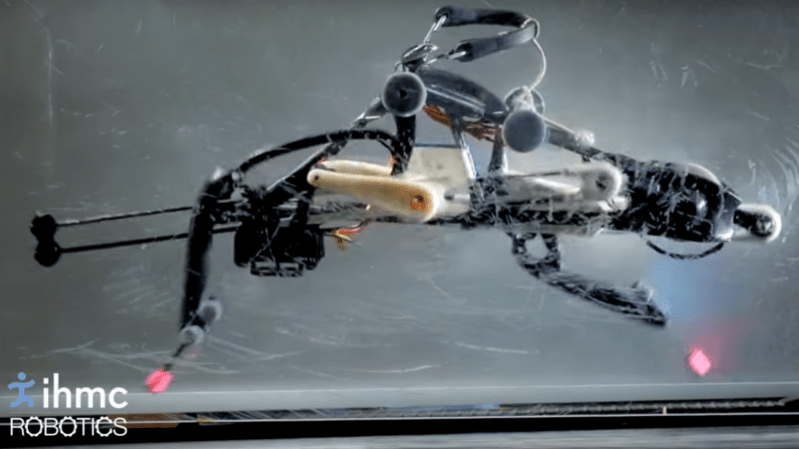
Officially dubbed a “Planar Elliptical Runner,” the bot is a test platform for bipedal locomotion from the Institute for Human and Machine Cognition. Taking inspiration from the gait of an ostrich — we think it looks more like a T. rex or velociraptor, but same difference — [Jerry Pratt]’s team at IHMC have built something pretty remarkable. Contrary to all the bipedal and quadrupedal robots we’ve seen, like Boston Dynamics’ Big Dog and PETMAN, which all fairly bristle with sensors and actuators, the PER is very stripped down.
 A single motor runs the entire drive chain using linkages that will look familiar to anyone who has taken an elliptical trainer apart, and there’s not a computer or sensor on board. The PER keeps its balance by what the team calls “reactive resilience”: torsion springs between the drive sprocket and cranks automatically modulate the power to both the landing leg and the swing leg to confer stability during a run. The video below shows this well if you single-frame it starting at 2:03; note the variable angles of the crank arms as the robot works through its stride.
A single motor runs the entire drive chain using linkages that will look familiar to anyone who has taken an elliptical trainer apart, and there’s not a computer or sensor on board. The PER keeps its balance by what the team calls “reactive resilience”: torsion springs between the drive sprocket and cranks automatically modulate the power to both the landing leg and the swing leg to confer stability during a run. The video below shows this well if you single-frame it starting at 2:03; note the variable angles of the crank arms as the robot works through its stride.
The treadmill tests are constrained by a couple of plastic sheets, but the next version will run free. It’s not clear yet how directional control will be achieved, not is it obvious how the PER will be able to stop running and keep its balance. But it’s an interesting advance in locomotion and we look forward to seeing what IHMC’s next trick will be.
[via r/gadgets]















https://www.youtube.com/watch?v=o8T095mFdW8
Nice to see Dr. Steve Brule again, but why?
Surely you know
https://www.youtube.com/watch?v=-Q76H7tP7Ig
From an evolutionary standpoint, if nature has managed to produce something then it must at one point have done it in a very rudimentary way, with minimum resources.
If you have a walking animal, the first of the kind must have done so with barely any skill, so it stands to reason that there is a simple mechanical solution to the problem such as walking which is completely “brainless”, ie. it doesn’t require complex calculation, intricate structures and fine balancing acts to pull off because otherwise there’s too big of a gap for the creature to suddely start doing it.
So this thing is basically like the first lizards that learned to run. They didn’t need to know how to aim, they probably just needed a way to get the hell out of dodge. Then they evolved the ability to steer by shifting balance etc.
The evolution of walking doesn’t suddenly start by running or jumping upright with long legs. Walking started as propelling the body of an aquatic reptilian along the bottom of the sea using dorsal fins. All other forms of walking followed after that.
*pectoral fins.
Perhaps not in the sea though…
https://youtu.be/LGlsR9b5RH0
Not saying its definitive, But the idea of complex life forming in sheltered pools within crevices fissures and caves..fed by runoff from rain…..then eventually making their way to the sea seems a bit more likely than it developing in a highly saline environment from the start….to me at least.
“(Nor) is it obvious how the PER will be able to stop running and keep its balance” easy! The same way babies do, with its face. No better brake pads than a few meters of dirt.
Quality lithobraking will stop ya!
+1
not actually self balancing at all then, as it can be clearly seen leaning on and bumping off the perspex walls, I wonder if we will ever see the ACTUALLY self balancing model?
this is only theory, maybe in 10 years….
It doesn’t work yet…..
For the decades I blindly believed the explanations that walking requires feedback and running is even more dynamic task… But the authors says that’s a bullshit, if you do the math right a set of passive component can give an inherent stability to a robot? This is insane…
Running may not need feedback, we will see, it still doesn’t run free yet. But other things such as stopping sure does. There are many ways of stopping from a run, slowing down, sliding etc but all of them require calculation to perform. I doubt this could ever stop because I don’t think it would be stable at walking speeds.
Was anybody else watching this GIF an daydreaming about a version large enough for a grown person to ride?
Was anyone NOT doing that?
I’m sure Colin Furze is working on it.
B^)
The brilliance of capability with simplicity of design blows your Furby robot out of the water. You shouldn’t put a Furby in the water anyway as it’s not waterproof. ;)
At the 0:35 mark, what is the girl in blue thinking?
“Oh no! What have we done?”
Now where have I seen this before?
Love the simplicity and velocity at which I
can now launch a webinar with a in-built advertising and marketing entrance finish.