Although the jogging stroller is a fixture of suburban life, allowing parents the opportunity to get some exercise while letting their young children a chance for some fresh air, it would seem like the designers of these strollers have never actually gone for a jog. Requiring a runner to hold their hands at fixed positions can be incredibly uncomfortable and disrupts most people’s strides and cadence — so [John] attempted to solve the problem after finding one of these strollers on the secondhand market.
While there are some purpose-built strollers that attempt to address these issues, they can be pricey. Rather than shell out for a top-dollar model, [John] got to work with his 3D printer and created a prototype device that allows him to attach the stroller at his waist while leaving his hands free. There were a few problems to overcome here, the first of which would cause the device to buckle under certain loading situations. This was solved with some small pieces of rope which act as flexible bump stops, keeping the hinge mechanism from binding up. Another needed to be solved with practice, which was that it took some time to be able to steer the stroller without using one’s hands.
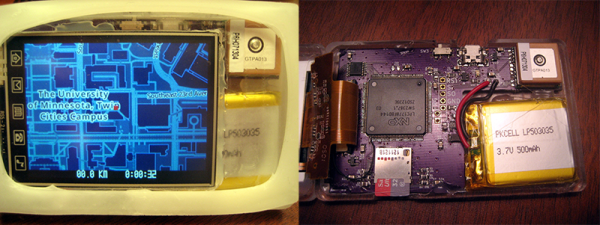
As an added bonus, [John] also included a system that tracks the distance the stroller has traveled. Using a hall effect sensor and a magnet attached to the wheel, a small microcontroller is able to quickly calculate distance and display it on a tiny screen mounted near the handlebars. Although smartphones are handy, their GPS systems can be surprisingly inaccurate, so a system like this can be a better indicator since it’s being directly measured. All in all, not a bad few upgrades to a secondhand stroller.

 process, given that there is indeed a fair amount of science to shoe design. Firstly, after a quick run, the main issues with some existing shoes were identified, specifically that there are a lot of pain points; feet hurt from all the impacts, and knees take a real pounding, too. That meant they needed to increase the sole cushioning. They felt that too much energy was wasted with the shoes not promoting forward motion as much as possible; feet tended to bounce upwards so that a rocker sole shape would help. Finally, laces and other upper sole features cause distraction and some comfort issues, so those can be deleted.
process, given that there is indeed a fair amount of science to shoe design. Firstly, after a quick run, the main issues with some existing shoes were identified, specifically that there are a lot of pain points; feet hurt from all the impacts, and knees take a real pounding, too. That meant they needed to increase the sole cushioning. They felt that too much energy was wasted with the shoes not promoting forward motion as much as possible; feet tended to bounce upwards so that a rocker sole shape would help. Finally, laces and other upper sole features cause distraction and some comfort issues, so those can be deleted.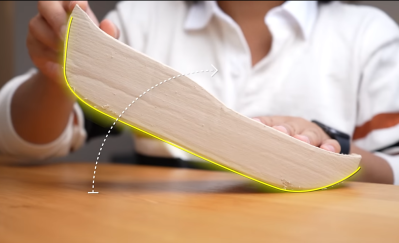

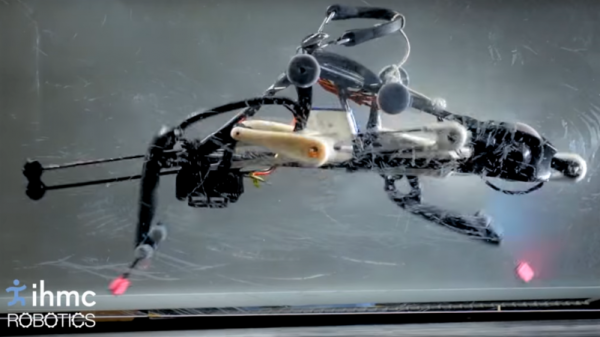
 A single motor runs the entire drive chain using linkages that will look familiar to anyone who has taken an elliptical trainer apart, and there’s not a computer or sensor on board. The PER keeps its balance by what the team calls “reactive resilience”: torsion springs between the drive sprocket and cranks automatically modulate the power to both the landing leg and the swing leg to confer stability during a run. The video below shows this well if you single-frame it starting at 2:03; note the variable angles of the crank arms as the robot works through its stride.
A single motor runs the entire drive chain using linkages that will look familiar to anyone who has taken an elliptical trainer apart, and there’s not a computer or sensor on board. The PER keeps its balance by what the team calls “reactive resilience”: torsion springs between the drive sprocket and cranks automatically modulate the power to both the landing leg and the swing leg to confer stability during a run. The video below shows this well if you single-frame it starting at 2:03; note the variable angles of the crank arms as the robot works through its stride.