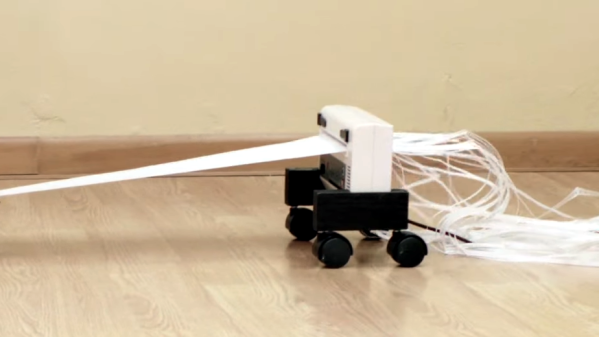
We enjoy hacks that combine or alter devices, enhancing (or subverting) their purpose in the process, but [Japhy Riddle] reminds us all that sometimes it’s fun just to enjoy a spectacle. In this case, it’s an old paper shredder given wheels and a continuous line of paper to rip into.
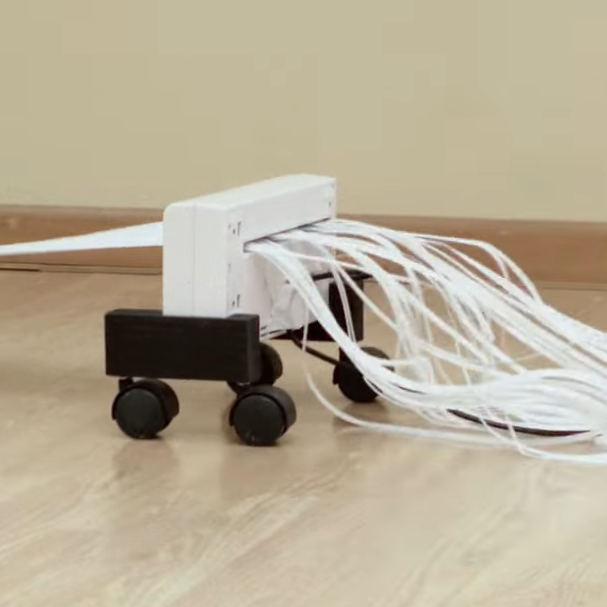 The result is a device demonstrating a shredder-based form of locomotion, noisily pulling itself along by its own insatiable appetite.
The result is a device demonstrating a shredder-based form of locomotion, noisily pulling itself along by its own insatiable appetite.
It even looks like a robot, even though there’s nothing really going on inside. It just mindlessly and noisily consumes, converting paper into shreds, moving inexorably forward and limited only by the supply of paper or the length of its power cable, whichever is shorter. Powerful artistic statement, or simple spectacle? You be the judge.
Want to try your hand at a paper shredder-inspired piece? You can take artistic inspiration from the stock tracker that literally shreds your money when the market is down, or if you’re more interested in the worky bits, make your own shredder from LEGO.
Continue reading “The Insatiable Hunger Of Paper Shredder-Based Locomotion”