Potatoes deserve to roam the earth, so [Marek Baczynski] created the first self-driving potato, ushering in a new era of potato rights. Potato batteries have been around forever. Anyone who’s played Portal 2 knows that with a copper and zinc electrode, you can get a bit of current out of a potato. Tubers have been powering clocks for decades in science classrooms around the world. It’s time for something — revolutionary.
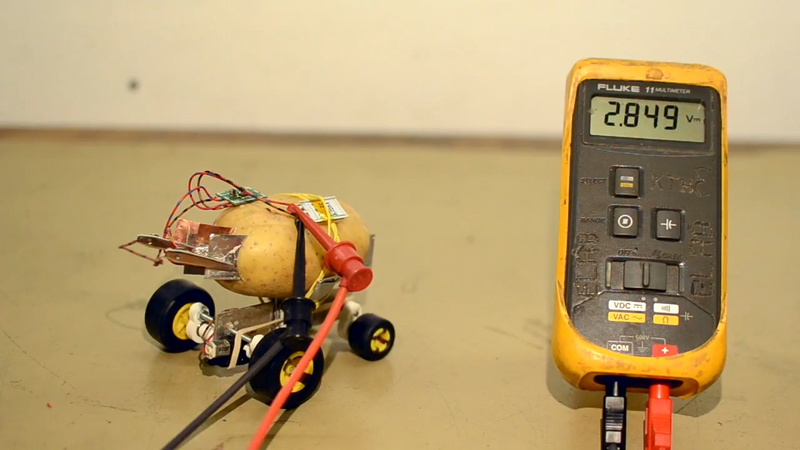
[Marek] knew that powering a timepiece wasn’t enough for his potato, so he picked up a Texas Instruments BQ25504 boost converter energy harvesting chip. A potato can output around 0.4 V at 0.6 mA. The 25504 uses this power to slowly charge a capacitor. Every fifteen minutes or so, enough energy is stored to power a motor for a short time. [Marek] built a car for his potato — or more fittingly, he built his potato into a car.
The starch-powered capacitor moves the potato car about 8 cm per cycle. Over the course of a day, the potato can travel around 7.5 meters. Not very far, but hey, that’s further than the average potato travels on its own power. Of course, any traveling potato needs a name, so [Marek] dubbed his new pet “Pontus”. Check out the video after the break to see the ultimate fate of poor Pontus.
Now that potatoes are mobile, we’re going to need a potato detection system. Humanity’s only hope is to fight fire with fire – break out the potato cannons!















Isn’t the potato just acting as electrolyte, not energy reserve?
Yep. The half-reaction potential of zinc oxidation is about -0.76v and copper reduction +0.34v; so potato, lemon, sauerkraut, or salty water and a sponge: about 1.1volts per cell. https://en.wikipedia.org/wiki/Half-reaction#Example:_Zn_and_Cu_Galvanic_cell
Is there a sensible way of producing actual power from a potato?
eat it?
Make ethanol and burn it?
Make ethanol and drink it?
you win comrade
good job for a joule thief … we don’t need no stinkin’ chips
The potato is not fried to chips in this experiment. :-)
Funny video. I was sitting here eating potato chips while I watched it.
Seemed fitting, somehow…
My username is relevant!
“I’m a potato.”
“I understood that reference!”
I wonder what would happen if you used a living plant for this, could leaves be used as photodetectors so that it would drive into sunlight? Could you build a self sustaining cyberplant?
I imagine the hard part would be trying to come up with a solid state (non-consumable) sensor capable of translating biological information (e.g. hormones such as Auxin used in phototropism) to a more easy to us electrical representation. I have used strain gauges on plant stems and feed back information when the plant stem bends towards the light to indicate which direction the light is coming from. Lag time is slow so perceivable feedback is on the order of tens of minutes to hours.
I used to have a project that used the same idea tied to a Venus Fly Trap that tweeted each time it caught something. Fun times.
This thing would be slow like the potato robot, so it wouldn’t matter if the latancy times were on the matter of minutes/hours.
I once read about some guy who used a polygraph to measure some kind of “impulses” in a plant. He got somewhere, but I don’t know if this is applicable.
Best ever
Back when TI and their dealers ran a 430 Day event for the (appropriate) MSP430 device that was a common idea. What build instructions?
Silly computer…. “What build instructions?” is “What about build instructions?”
I would have better name for it, Irish
Up next: “Attack of the Killer Potatoes”
GAA!! Self-driving potatoes! …well someone had to say it…
Rocko’s Modern Life S4 Ep12
Heffer eats the science experiment…
The potato is a lie.
tell me about it…
POTATO: What is my purpose?
RICK: To move on your own.
We used to have Spud Zero (early punk club) now we’re moving!
Did a slow clap processor make it into this thing?
Can you get more power out of a potato or lemon if you make multiple slices into it and insert as many alternating copper and zinc plates?
No, you need to have them in series zinc then copper tied to zinc then another copper tied to zinc, etc, until to end of the cell where you have a final copper. I seem to remember this working.
This has all the ingredients of a successful Hackaday competition. Some boffin can work out a speed distance equation for points, no undue cruelty allowed and any coercing with threats of pots and water or microwave ovens will be severely reprimanded.
To power my 850 square foot/79 sq meter house with potatoes for one month I would need 63,159 boiled tubers, or 631,590 raw spuds.
http://www.movoto.com/blog/novelty-real-estate/power-your-house-with-potatoes/
I seriously doubt that data as his calculations seem to be based on the voltage the potato generates which is totally not the case.
Can you provide a little more guidance on the board the TI chip is on, motor specs and capacitor parts? I don’t need the fancy self-steering but would love to create one for a science project!
Thanks for the post, i am sharing your post.:)
https://ubernurture.wordpress.com
Why is this tagged as “energy harvesting” ?