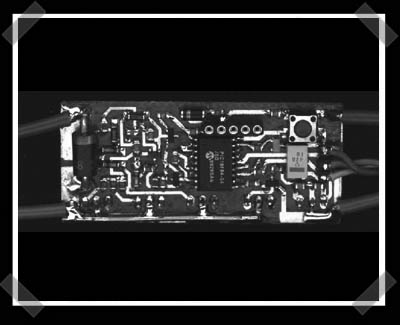
Alrighty, this is a pretty straight forward one. [Jason] discovered our tips line – he sent in quite a bit of stuff. I scored a pair of $120+ RC cars for $25 each recently, and this would come in handy. In fact, the store drone that checked me out didn’t believe that I could build my own speed controllers cheaper than they $30 units they had on the shelf. This R/C car speed controller uses a SMD pic 16F84 accepts standard servo input from a stock controller. It uses several fets to drive a motor at up to 40 amps. Everything you need, including eagle cad files is included in the zip file.
(I’m down in San Antonio this week – so far it’s been fun. I finally picked up a panavise junior and restocked my heat shrink and soldering supplies. )














nice. gotta remember it for robotics season
neat… is it forward-only?
I’d assume so if it references operating in an R/C plane..
Still quite useful to me.
damn, those looked really cool, i wish i was nifty with a screwdriver so i could make one.
San Antonio, of all places? :O I live there. Needless to say it’s not the hottest of vacation spots. What brings you down here?
i looked at the diagram and Yes, forward only
Shouldn’t it be possible to just… reverse the current to reverse the speed? I don’t claim to know everything, pretty new at this, but I would think that it should – all the electric motors I’ve used if you just reverse the current the motor spins the other direction. Or is that not a healthy practice for your motor?
You can certainly just reverse the current to reverse the direction of turn; most motors are absolutely fine with it. They do generally have a preferred direction, and won’t run quite as powerfully backwards, but that’s not a big deal.
The trick is, that means that rather than connecting and disconnecting one end of the motor from power with the other connected to ground, now you need to be able to connect and disconnect both ends of the motor to both power and ground. It takes four times as many switching devices to do it. So the cost isn’t in getting the motor to be happy with running backwards, it’s the actual effort required to change the direction of the current through it. This design is of the simpler, unidirectional variety.