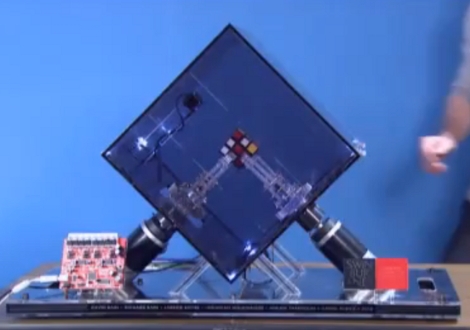
This cube-shaped bot just shattered the robotic Rubik’s Cube solving record by about 8 seconds. It did it in a blazing 10.69 seconds to best the old record of 18.2 seconds. There was immediate confusion here at Hackaday as some of us thought the record was actually around six seconds. And it is, for humans. That’s right, the human record holder completed a cube in 6.24 seconds… faster than a robot by almost four seconds. It’s surprising that we can still beat mechanized devices at some repetitive mechanical operations.
Take a look at the speed run shown in the video after the break. What strikes us is that the motions are incredibly efficient, and the bot is very quite. Compare that efficiency to CuBear, a solver that uses a different motor for each side of the cube. That one doesn’t need to grip the cube making us think it could beat this version if the firmware were quite a bit faster.
[youtube=http://www.youtube.com/watch?v=oWtBTKpWVXk&w=470]














The guy who holds the current world record was allowed to analyze the cube for as long as he wanted before he physically solved the cube. The robot creates an algorithm on the fly, the human does not. Who is the real winner?
If you let the computer study it then it takes this machine one second to solve it: https://youtu.be/laPVTrzGDpA
Impressive! What a great student project
Very cool, but I was not aware that people still cared about the Rubik’s Cube. Either way, it is very impressive!
Wow, cool project. Very solid and fast movement of the robot arms. I wonder what their budget was…
The robot is very _quiet_
It’s quite quiet.
The robot is impressive…
but let’s not think that we cannot build a machine that solves it faster. All this would need is faster mechanical components. The movement is the one that takes time, analyzing the image needs very little resources considering that the camera is fixed. And computing the solution is nothing for a normal home computer.
Also, i’m a bit confused about comparing the timings. Are they compared by starting with cubes scrambled in the same way?
“…and the bot is very quite.”
That makes even me cringe, and I’m not even a native English speaker ;-)
Of course it is quiet – they put a plexiglass box around it to block the sound.
quite quiet
What about CubeStormer? http://www.youtube.com/watch?v=f1y1m6YLnu8
that’s sub 10 seconds and made of lego
Certain starting conditions can lead to very expedited steps in such a procedural approach and therefore a time such as 6 seconds can safely be assumed to have been a very lucky start mix up and a very good solver.
Additionally, a computerized solver CAN implement the ideal algorithm which is simply a lookup table of all possible permutations and the fastest solution for the machinery, whereas a human will always need to follow a procedural approach.
My point is that, if you were comparing any sort of data whatsoever, rather than the two extremes, saying that humans solve cubes faster than machines is pretty wrong…
I would just like to let you know that for robots the time the get to scan the cube is still counted in their time. For humans the can look at the cube before the time is started.
i need to take all the stickers off the squares and stick them back on again.
This is awesome. Although I could have sworn the human cube record was faster than 10s. It looks like the machine only images one face. Does that mean it spends moves to capture the cube state?
From my limited understanding of the robot, it scans 3 sides of the cube with the camera, works out the moves required to solve the cube and then executes them.
As for humans doing it faster. I bet you the ‘fastest’ human if given a completely random cube, they will take a lot longer than 10s to solve.
-Crenn
Student at Swinburne Uni
@Effigy
a minor point, a lookup table to solve a cube would be terriby inefficient. it would have 43,252,003,274,489,856,000 entries each with up to 20 steps.
@Thomas Grainger
I was thinking the same thing, cubestormer has been around for ages too. Plus it has an auto-loader.
First the chess playing robot, then the juggling robot and now this, three robots that can do things I can’t! I feel so inadequate! :.(
What I would like to see is a robot that takes a Rubik’s cube apart and reassembles the parts in record time. That’s the way MOST people solve it, right? ;-)
===Jac
I think we need to make a robot that takes the stickers off and re-attaches them, and then compare that to a human. :)
The computerized solution will inevitably be faster for this approach to solving, because when in boils down to it, the rubiks cube solution is just an algorithm, which computers are very good at running through. With some really good programming and enough processing power, the bottle neck then becomes the physicality of a rubiks cube.
@Egffigy – “simply a lookup table of all possible permutations”
http://en.wikipedia.org/wiki/Rubik%27s_Cube#Permutations
“The puzzle is often advertised as having only “billions” of positions, as the larger numbers are unfamiliar to many. To put this into perspective, if one had as many 57-millimeter Rubik’s Cubes as there are permutations, one could cover the Earth’s surface with a layer 275 cubes thick.”
That’s some lookup table : )
“It’s surprising that we can still beat mechanized devices at some repetitive mechanical operations.”
For now.
Using a faster camera would knock off about 2 seconds, looks like its fairly slow at the start to allow the camera to get a clear image.
Also, are they intel heatsinks at the base of the cube clamps?
With metal clamps and more powerful servos, the only limit would be the mechanical reliability of the cube itself. and whatever time it takes for the image capture and analysis.
2nd aussie uni project featured this week. woo
CuBOT would probably not be eligible. In the form linked to in this article at least, it requires modification of the cube which, in most reasonable records/tests should disqualify it.
Unless, maybe they counted the scrambling stages.
Who cares what color the squares are… It looks prettier all jumbled up. NOT impressed.
When a robot gets two layers done, then puts it down and goes to watch TV because the thrid layer just isn’t worth the effort… THEN I’ll be impressed.
From one of the team himself.
http://forums.overclockers.com.au/showthread.php?t=962866
6.24 seconds!! That sounds like stupid luck to me!
@Dax
I don’t believe the plexiglass box is blocking very much sound. You can still hear the rubix cube when the robot shifts the tiles around.
I believe you meant “quiet” not “quite”
It cheated. It watched him mix up the cube beforehand. Sneaky bastard.
+1
@Knuckleballer
It’s FAR from luck.
Also, I love the way the robot tilts the cube at the end after it solves it. Nice little touch.
6 second world record
http://www.youtube.com/watch?v=t32VQ2HeELA
Solves in 5.352seconds, made from lego, epic song.
Your arguments are invalid
http://www.wimp.com/robotsolves/