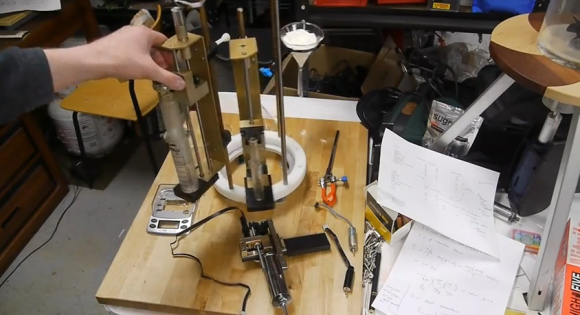
[Ben Krasnow’s] latest project is a delicious one. In the image above he’s showing off the beginnings of his cookie dispenser. No, it’s not another take on a way to eat Oreo cookies. It actually comes much earlier in the production chain. His device is akin to a 3D printer for baked goods in that it will be able to automatically combine raw ingredients to form production runs as small as a single serving of cookie dough.
When we first heard about it we wondered why you would want to bake just one cookie? But of course that’s not the purpose at all. The machine will allow you to bake a full sheet of cookies, but provides the option of making each one of them with a different recipe. As with all baking, combining ingredients in the proper proportions is paramount. In the post linked at the top he’s working on a butter dispenser. But in an earlier post he hacked an electronic scale to help weigh other ingredients. You can watch both video clips after the break.
Imaging a dozen cookies with slightly different amounts of flour in them. A few test sheets and he should be able to dial in the very best recipes.














Since the pain in the a$$ in making cookies is making the dough, not making the cookies from the dough, I am not seeing this as very useful
Joe read the article again making dough is the exactly the goal of this machine.
Mike is a psychic and has an 800 hotline…
800-Mama-mike
…haha! good call mike!
…. wtf does he mean “6.5µs per bit is too fast for a microcontroller to listen in”?????
any PIC with a USART or MSSP, or whatever atmel micros and msp430s have can use the hardware assist.
Even a 1 MIPS PIC could do this (6µs per bit), although it would require writing assembly—which he’s clearly not afraid of, he’s using a propeller!
Just don’t put other code in the interrupt.
That was my reaction too. It’s a low speed I2C bus, it should be really easy for a PIC or any other 8051 core microcontroller to read.
Love the video about how the butter syringe works! [Ben Krasnow] is really good at clearly describing what he’s doing.
One imagines Nabisco and other companies becoming very interested in this for their R&D kitchens.
Now if it could make and dispense two different doughs for different parts of the cookie… New York deli style black and whites on demand. How about cookies with two layers bonded together?
“single serving of cookie dough”
That’s just crazy talk there – who would ever want just a single serving of cookie dough???
Those using Easy Bake ovens?
Those videos were actually really interesting. I hardly ever watch videos from start to finish!
shut up and take my money
As others have pointed out, using the SPI peripheral to monitor the A/D output simplifies a lot of things. The /CS line goes to the new controller as a slave select, providing packet synchronization. Then, use the clock and data as inputs to the SPI peripherals. after 8 bits (8-bits * 6uSec = 48uSec), the peripheral generates an interrupt, and the controller reads the data.
Since he already had a datasheet for the display controller, I would have monitored that instead, and let the scale do all the tare and scaling for you – its already calibrated.