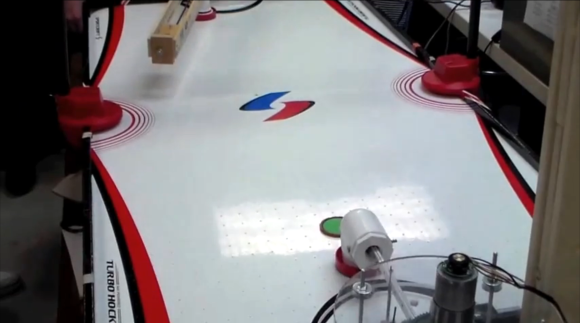
My final project is build a robot that plays air hockey? Where do I sign up? Apparently you get yourself a seat in ECE496 at Clemson University. They have been using the concept as a final project for at least a couple of years. [Abe Froman] was on the winning design team this year and he’s showing off his robot and some winning games it played.
His robot is in the foreground. It uses a right-angle PVC joint to hold the paddle. The fitting is attached to a rack and pinion that drives it forward and back. The entire assembly is mounted on a rotating rig. Take a look at some of its opponents that use more of a plotter-type arm. Those offerings have too much play in the joints which at times causes the thing to miss.
Chances are good that once you get a job you won’t be asked to do things for the company unless they are money makers. Sure, there are a few notable exceptions, but since you’re playing to go to school we really appreciate the professors making the learning as enjoyable as possible before you have to get serious (and maybe even wear a tie!).
[via Reddit]














The first opponent seems to be designed to hit pucks into it’s own goal.
The last robot (with a similar shoulder/elbow arm) looked very competitive though.
I think it was mostly programming that won in this even.
a friend showed me a vid of robot challenge when he was in college
https://www.youtube.com/watch?feature=player_detailpage&v=4sljz0AP9fA#t=33s
THE sausage king of Chicago?
I’m glad I’m not the only one who got that.
I wish we could promote comments
I’m suggesting that you leave before I have to get snooty.
snooty??
The robot in the opposite side already lost before software development even started because of the mechanical design. It has some serious slip and oscillates like hell after more aggressive moves. The bottom robot had a much more stable mechanical design.
That can easily be remedied in software.
The robot appeared to be using a constant motor strength for moving the arm. This would cause a pretty bad oscillation in the arm, as the motors are always over correcting. Having a move linear or exponential falloff to the motor strength as the position got closer to its goal would have dampened the oscillations greatly.
http://www.youtube.com/watch?v=tqpvAxtrw9Q
Since EVERY shot (when including bank shots) should be able to score unless the opposing side successfully defends, it seems like there’s PLENTY of room for improvement on the targeting aspect.
Agreed, they should train it to be able to turn it’s arm and extend it at the same time to achieve more angles of impact. and maybe let it sit there and hit test pucks in until it learns the real angles of the table rather than static guesses. I’m sure factoring in incoming speed will add significant complexity to this part though. You’d somewhat need a real physics model of the table.
“… but since you’re playing to go to school…”
s/b “paying”?
//unless it’s a sports scholarship, but not too many of those in engineering!
My team’s robot won this competition the previous year. Here’s a video of our design if anyone is interested: http://www.youtube.com/watch?v=ICcFTuLFaUQ
A robot that plays air hockey sounds like too much fun. It would sure keep the kids happy for awhile.
the good thing about Robotics is that not only provides for procedures and business, industrial and other processes but also for fun