[ivorjawa] is putting on a haunted house this Halloween that we really don’t want to go to. His robot tentacle is already supremely creepy, and we’re assuming it will only be more frightening once it’s covered in fabric and foam rubber.
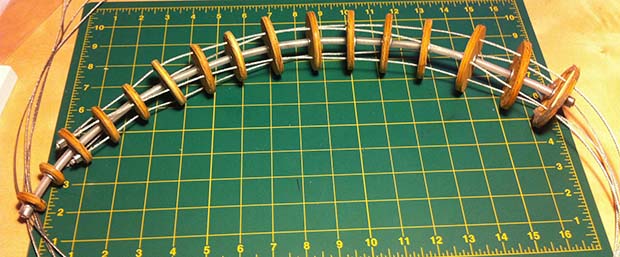
Each tentacle can move on two axes thanks to four steel cables running through this strange Geiger-esque contraption. In the base of the tentacle are two stepper-motor driven cylinders that take up slack on one cable and draw out another cable. Two of these control boxes, driven by a stepper motor and an Arduino motor shield, allow the tentacle to reach out and grab in any direction. You can check out the mechanics of the build on [ivorjava]’s flickr
On a semi-related note, even though we’re more than a month out from Halloween, we should have more Halloween builds in our tip line by now. If you’re working on one, don’t be afraid to send it in, even if you’re just showing off a work in progress.














http://hackaday.com/2012/12/04/simplifying-fabrication-of-soft-robots/
That’s super creepy and cool, but it occurs to me that it would be more useful if it had some means of preventing the segments from rotating about the cable.
How is he able to achieve arbitrary 3D motion using only 2 motors? It seems to me you need at least 3, four if you’re using a four cable setup as mentioned.
Two motors will work with four cables by looping each cable around a pulley so it can pull in one direction or the other.
It’s not really arbitrary in 3D.. the tentacle’s length determines one axis.
Obligatory dildo joke here.
I’ve seen enough hentai to know where this is going.
Reminds me of a *way* more advanced version of my costume tiger tail. Think I’m going to have to try this for Halloween this year.
Awesome man, makes me want to go pickup an Arduino kit and play with it right now.