
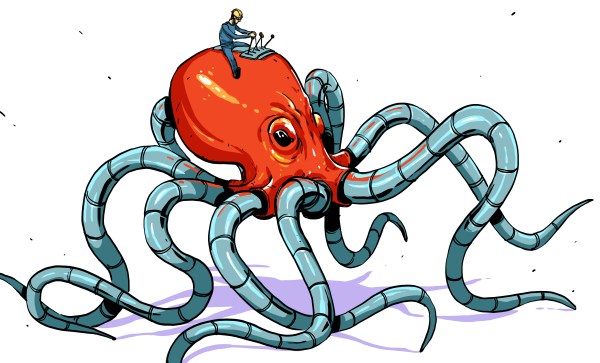
Human hands are remarkable pieces of machinery, so it’s no wonder many robots are designed after their creators. The amount of computation required to properly attenuate the grip strength and position of a hand is no joke though, so what if you took a tentacular approach to grabbing things instead?
Inspired by ocean creatures, researchers found that by using a set of pneumatically-controlled tentacles, they could grasp irregular objects reliably and gently without having to faff about with machine learning or oodles of sensors. The tentacles can wrap around the object itself or intertwine with each other to encase parts of an object in its gentle grasp.
The basic component of the device is 12 sections “slender elastomeric filament” which dangle at gauge pressure, but begin to curl as pressure is applied up to 172 kPa. All of the 300 mm long segments run on the same pressure source and are the same size, but adding multiple sized filaments or pressure sources might be useful for certain applications.
We wonder how it would do feeding a fire or loading a LEGO train with candy? We also have covered how to build mechanical tentacles and soft robots, if that’s more your thing.

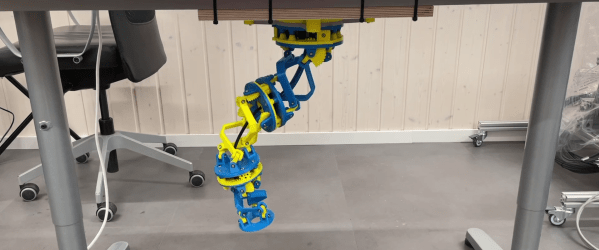



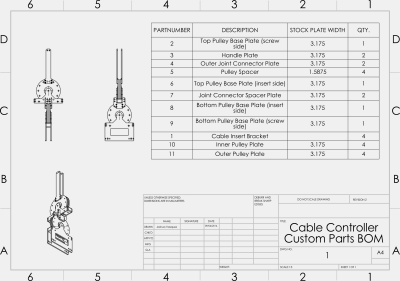 In a good-ol’ engineers-for-engineers fashion, I’m doing something a little different for this post: I’m finishing off this series with a set of assembly videos, a BOM, and the original CAD files to make that beast on the front page come to life. As for why, I figured: why not? Even though these mechanisms have lived in the robotics community and film industry for years, they’re still lacking the treatment of a solid, open design. This is my first shot at closing that gap. Get yourself a cup of coffee. I’m about to give you every bleeding detail on the-how-and-why behind these beasts.
In a good-ol’ engineers-for-engineers fashion, I’m doing something a little different for this post: I’m finishing off this series with a set of assembly videos, a BOM, and the original CAD files to make that beast on the front page come to life. As for why, I figured: why not? Even though these mechanisms have lived in the robotics community and film industry for years, they’re still lacking the treatment of a solid, open design. This is my first shot at closing that gap. Get yourself a cup of coffee. I’m about to give you every bleeding detail on the-how-and-why behind these beasts.








