It’s that time of year again when the senior design projects come rolling in. [Ben], along with his partners [Cameron], [Carlton] and [Chris] have been working on something very ambitious since September: a robotic arm and hand controlled by a Kinect that copies the user’s movements.
The arm is a Lynxmotion AL5D, but instead of the included software suite the guys rolled their own means of controlling this arm with the help of an Arduino. The Kinect captures the user’s arm position and turns that into data for the arm’s servos.
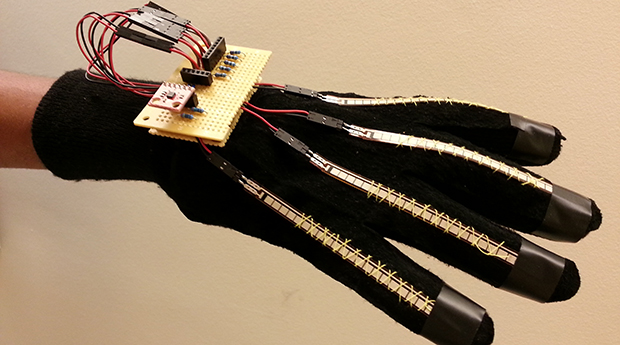
A Kinect’s resolution is limited, of course, so for everything beyond the wrist, the team turned to another technology – flex resistors. A glove combined with these flex resistors and an accelerometer provides all the data of the position of the hand and fingers in space.
This data is sent over to another Arduino on the build for orienting the wrist and fingers of the robotic arm. As shown in the videos below, the arm performs remarkably well, just like the best Waldos you’ve ever seen.














I’m not about to say that this is terrible or anything. Actually, I can’t at the moment even come close to what these people have accomplished. However, for the sake of presentation, the seemingly loose and rickety setup makes it nerve-racking to watch.
It was definitely a real possibility that our rig could have broken down any moment that night.
Can someone find the code of the accelerometer and the flex resistors?
Hi, guy in the video here.
I’ll get around to putting it on github eventually, for now, you can look here: https://www.dropbox.com/sh/1r5pxcpt4wncujr/4c3HZgGwUe
specifically in the “arm” and “hand” directory. In particular, the accelerometer code is just the library provided by Sparkfun: https://www.sparkfun.com/products/10955
and “flex sensor code” is just a bunch of analogRead()
thanks