

It’s been quiet these last few weeks in drone news. Some members of the commercial community are performing missions, while others are waiting on the results of the FAA’s appeal to the NTSB. There is no denying that drones are getting larger as an industry though. Even Facebook has jumped into the fray, not for drones to deliver real world pokes, but to provide internet access in remote areas.

One of the high points in the news was an octocopter operator’s discovery of 2500 year old rock drawings, or petroglyphs in the Utah desert. While exploring a known archeological site, Bill Clary of GotAerial LLC flew his octocopter up to a cliff face. The rock formation would have made rappelling down the face difficult at best. He found an amazing collection of petroglyphs which he documented in this video. While the authenticity of the petroglyphs hasn’t been proven yet, they appear to date back to the Basketmaker people who lived in the area from approximately 500 BC through 860AD.
Maybe you’re asking yourself how you can get in on some of these sweet drone adventures? Whether you’re considering your very first flight, or already own multiple aircraft, you’ll want to read our discussion of getting started (specifically: acquiring your first drone) and discovering drone-related communities. Hit that “read more” link to stay with us.
Drone, Drone of my own: Getting started
Getting started with drones SHOULD be easier than it is. As with any complex endeavor, there are some common pitfalls which often snag enthusiasts. The biggest one I see is a new pilot buying and building an expensive model – be it for sport, aerial photography, FPV, or fully autonomous – without learning how to fly first. This is a sure-fire recipe for disaster. Just about every autonomous model falls back to radio control when problems arise. FPV models can and do have video failures, so knowing how to fly line of sight is essential. Think of it as learning how to drive. You wouldn’t want to learn on Corvette or a Rolls-Royce. The same applies to drones. Don’t learn with an octocopter, or with $2000 USD of camera equipment hanging off your aerial photography rig.
Just choosing a first quad to learn with can be a daunting task. Back in the early 1990’s, I worked in a hobby shop. There were only a handful of large R/C manufacturers back then. Most of them were based in the US, Europe, and Japan. With the rise of China and the global economy, there are now hundreds of manufacturers and distributors of drones and RC models. This leads to the often seen “clone of a clone of a clone” situation we’ve come to recognize with the Arduino and any popular electronic device. But which models are of decent quality, and which are junk? The easiest way to get a good answer is to seek the advice of others.
 From my own experience, I’ve found a specific quad to be pretty good for learning to fly. It doesn’t hurt that it’s also one of the cheapest out there. The Syma X1 is a pretty darn good quad to learn with. The Syma appears to be a copy of the Blade MQX quadcopter – however Syma fixed a few flight issues the MQX suffered from. You can find the Syma at Amazon and other online retailers for around $30 USD. The X1 is a brushed quad, which means the motors use carbon brushes to transfer power to the coils. Most larger quads are brushless. Don’t let the older technology fool you. Brushed motors are just fine in this application. However, the one part of the X1 I don’t really like is the transmitter. While it does sport an LCD display, the sticks and overall action feel cheap. They had to save money somewhere. Even with that shortcoming, the Syma transmitter is fine to learn with. A real nicety is that the X1 can be paired with the very hackable Turnigy 9x series transmitters.
From my own experience, I’ve found a specific quad to be pretty good for learning to fly. It doesn’t hurt that it’s also one of the cheapest out there. The Syma X1 is a pretty darn good quad to learn with. The Syma appears to be a copy of the Blade MQX quadcopter – however Syma fixed a few flight issues the MQX suffered from. You can find the Syma at Amazon and other online retailers for around $30 USD. The X1 is a brushed quad, which means the motors use carbon brushes to transfer power to the coils. Most larger quads are brushless. Don’t let the older technology fool you. Brushed motors are just fine in this application. However, the one part of the X1 I don’t really like is the transmitter. While it does sport an LCD display, the sticks and overall action feel cheap. They had to save money somewhere. Even with that shortcoming, the Syma transmitter is fine to learn with. A real nicety is that the X1 can be paired with the very hackable Turnigy 9x series transmitters.
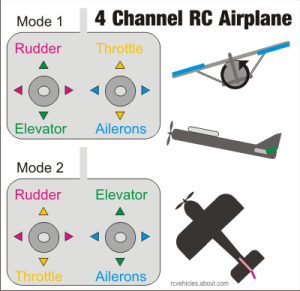 Don’t forget to check the mode of the transmitter when ordering. Mode 1/Mode 2 refers to the layout of the controls on the sticks. Asia and Europe tend to use Mode 1, with the throttle and aileron on the right stick. North America uses Mode 2, where throttle and rudder are on the left stick. Since throttle control doesn’t use a centering spring, this is a mechanical change, not just a software remap of functions. One mode isn’t any easier than the other to fly, but flying with friends is more fun when your radio has the same functions as theirs.
Don’t forget to check the mode of the transmitter when ordering. Mode 1/Mode 2 refers to the layout of the controls on the sticks. Asia and Europe tend to use Mode 1, with the throttle and aileron on the right stick. North America uses Mode 2, where throttle and rudder are on the left stick. Since throttle control doesn’t use a centering spring, this is a mechanical change, not just a software remap of functions. One mode isn’t any easier than the other to fly, but flying with friends is more fun when your radio has the same functions as theirs.
While I don’t plan to make Droning On a tutorial on learning to fly – there are plenty of great quality tutorials out there – I do want to help out with a few tips.
- If you you’re about to crash, chop the throttle. The X1 is so light that impacts usually result in no damage. Ensuring the motors are off when that impact happens will save your propellers, gears and motors.
- Try to fly over grass or dirt, not concrete. Some tutorials will tell you to skid the quad around on the ground while learning. The skidding is a throwback to R/C helicopter training. With small quads like the X1, it’s better to get a couple of feet off the ground and out of ground effect turbulence.
- If you feel like you’re losing control, let the sticks go – the gyroscopes and accelerometers on the X1 will often bring it back to a level hover.
- Keep the back of the drone facing you. In that orientation the drone will follow the movements of the stick. When you’re comfortable with that try out other orientations.
- “Nose in” is the hardest orientation to master, as your left is the quadcopter’s right. The quadcopter will mirror your stick movements.
- Have fun! Seriously – it’s easy to get frustrated and stressed out when learning . If that happens take a breather, and try to remember that even if it were to fly away, the X1 is only $30 to replace.
Drone Resources
One of my favorite aspects of the internet has always been the collaboration. Like ham radio operators, R/C and drone enthusiasts were early adopters of the internet. Where news and information would only come once a month through magazines, it’s now available instantly online. Usenet provided early access through the rec.models.rc newsgroup tree. As the web came of age, much of the conversation moved to forum based websites. Some of the oldest and richest resources are the R/C forums. The best example of this would be RC Groups. Created as part of the Ezone, an electric RC magazine dating back to 1995, RC Groups has sections for just about every aspect of the hobby. The Multirotor, FPV, Aerial Photography, UAV, and DIY Electronics sections will be of interest to Hackaday readers.
Here are a few other RC and drone oriented forums:
- RC Universe, general RC forum similar to RC Groups.
- FPV Labs covers first person video enthusiasts.
- multirotorforums covers all things multirotor – from tricopters to octos and beyond.
- AP Landing covers the aerial photography folks.
Note that this isn’t an exhaustive list. I tried to cover a few of the big sites. If you know of any that I’ve missed, please throw them into the comments.
The problem with most forums is finding information. Sure they have searches, but they usually leave quite a bit to be desired. As an example the main Syma X1 thread on RC groups is currently over 5200 posts spanning 348 pages. Topics meander, flame wars are waged, and post sizes get out of hand. If statistics are to be believed, RC Groups averages around 20,000 active users at any given time. It’s understandable how even an army of mods would have a hard time keeping up.
There are plenty of non-forum based drone information sites. 3D Robotics maintains a community site at DiyDrones which is chock full of forum and blog information. Instructables has a number of drone entries. The Drone section at Hackaday.io is still looking pretty lean – though we’re hoping you’ll help change that in the near future.
That about wraps it up for this edition of Droning On!














Wow – the X1 is indeed cheap. I just ordered one from Amazon!
Coincidentally, I received one as a gift yesterday. It does take a bit of practice to fly with anything closely resembling “control”. But with a bit of practice I was able to get it do pretty much what I wanted.
I can say that it stands up to frequent crashes… no broken parts yet!
We had one at the office. It was incredibly hard to fly in any reliable fashion and took many falls. Eventually we took it outside to try out the “flip” button, but it ended up flying out of control upside down and slammed into a concrete wall. After that the accelerometer would not work, and thus the craft refused to fly. (That’s what we think, at least, based on the lights and our Chinese coworker’s interpretation of the Chinese secton of the manual; the official “English” translation was almost indecipherable.)
Fun toy for a few weeks, but spend a couple bucks more for a better version.
I have one, and its fun to fly.
From my own experience, the first thing you must do is remove the top plastic case. It will make it less heavy and the wind don’t affect it so much.
… And buy some extra battery’s and a keychain camera ;)
Sadly you’ll have to do a bit of research and experiments to know the payload of any drone cheaper than one grand.
A Syma X4 is out there, smaller Lipo battery, ducted props, slightly higher price.
An additional Arduino Mini and some gadgets could require less than 10 grams…
I would like to try replacing the controller board on this X1. Of course I’ll wait until the trill of playing with it has passed. But the first thing I did upon unboxing was to remove the plastic chassis and pull up datasheets for all the chips on the board. I could lose a lot of time on this hobby ;-)
Did your board have all the part numbers on? Usually they’re sanded down.
I save money on my drones by going to HK. I see a drone a I like, i just shoot it out of the air, sure you gotta patch a few bullet holes or replace a few parts, but way cheaper than buying. the most expensive thing is the heckler and koch.
Umm, ha ha?
I have grave doubts about a so-called discovery by the person who aggressively tries to peddle drones.
I have doubts due to the fact that he starts talking about quadcopters but his illustrations for controls are for R/C airplanes. Unless I miss my guess, shouldn’t the control setup be different for a quad than a plane?
Actually a Quadcopter and a plane use identical controls. Roll, pitch and yaw are all controlled in the same fashion as a plane and using the same sticks. Throttle simply acts differently on a quad than it does on a plane (on a plane throttle directs thrust backward, while on a quad throttle directs thrust downward.)
Quads, Tricopters, Planes, Helicopters, all of them use the same basic controls. In fact, once in forward flight, helicopters and multicopters behave much like planes.
Okay, I’ll retract my previous statements. There was one thing that still confuses me, many controllers have multiple channels, some for preventing interference with other controllers and some for each control surface and some for both? What in the huh?
There are multiple radio frequencies in use, in the US older design used 72Mhz FM or PCM(with a few on the 50Mhz and 53Mhz HAM bands), most modern radios are on frequency hopping spread-spectrum in the 2.4Ghz range these days but you can find a select few on 433Mhz(in the US and some other regions) as well for special long range applications. In the process of the RC transmitter linking to the receiver on startup, the equipment chooses a frequency hopping pattern that is not in use by another radio so as not to interfere with other radios operating on 2.4Ghz. Usable frequency ranges and hopping patterns vary from country to country.
Channels refers to number of ‘control lines’ that a transmitter and receiver pair support to control devices or equipment on the aircraft. 7,8 or 9 channel radio sets are pretty common, though you can find some radios that go over 20 channels and some of the open source attempts are much higher than that. The channel data is encoded serially in the data stream. The receiver decodes the serial stream into separate output channels though in some systems it just puts the data out in a serial stream containing only the channel data. Some multicopter flight controllers and various types of servos support the serial stream which means 1 data line for all channels, instead of a wire for each channel, the devices just pick the information they need out of the stream.
Whatnot – If you’re talking about Bill’s discovery of the petroglyphs, I’m not 100% sure they’re legit either (which is why I mentioned they haven’t been verified). Still, he’d have to go to a heck of a lot of trouble to get up there and draw those figures himself… or find someone with some decent video chops, as I can’t see any obvious VFX trickery in there.
I’ve got the WLToys v949, a rebrand of the x1, bound to my t9x. Very fun to fly in little or no breeze.
I highly recommend swapping the propellers to GWS EP5443 props. http://www.banggood.com/buy/gws-ep5443.html
After doing a bit of research I picked up a couple of the <a href="http://www.symatoys.com/product/show/1883.html"Syma S33s for Christmas for < $50.00 ea.
One of the reasons for the choice of Syma was the availability of parts. Every part on those helis can be purchased individually(and at low cost) for making repairs. I know that the Blade helis also have parts readily available. The second reason is that the Syma products have a reputation for durability. The third factor was, of course, price.
The very first thing I did was a lift test. The test setup was a bit crude(some pieces of paint stirring stick, masking tape, four cans of Dr. Pepper, and a scale with either .1 KG or .05 KG resolution[I don't feel like getting up to verify ATM]), but the number I ended up with was a whopping 0.7 KG.
There are of course problems with that number. I'm not aerospace engineer, but off the top of my head there's going to need to be some very significant de-rating because:
That's a brand new unit with no wear and tear or loss in performance
I'm pretty sure that helicopters have ground effect as well. IIRC, while that causes turbulence, it also allows for greater lift
The S33 is also big enough to fly outside, although I've found that it has to be perfectly still to do so with any manner of controllability. I can also say that these units are remarkably resilient(the one I play around with has probably crashed a hundred times, a few times quite spectacularly).
I ended up making a few modifications in the interest of just experimenting with the platform. I stripped off what seemed to be extraneous components, and was able to remove quite a bit(seemingly without impacting the units durability). I doubt there was any significant weight reduction, but I don't have a sufficiently accurate scale to give detailed numbers.
I re-routed some wiring to make it possible to charge without having to remove what I'm going to call the "body". I also modified the way the battery is held in place to make it easier to remove, and move it slightly to adjust the center of gravity. I also replaced the rear rotor with a larger unit. After these changes the unit was considerably more responsive.
My point in all of this is that I agree with the author. I think these pre-packaged units are a great place to start. I also think that the parts available for these units are a valuable resource, even for a scratch build. The main reason for the purchase of these particular models was for experimentation. I can imagine a viable dual inline platform based on these units(in fact, Syma makes Chinook models(they have two sets of counter-rotating propellers), just not in the scale that I want).
The next step for me is a bit of reverse engineering of the controller board. The transceiver appears to be a somewhat separate module, and I've done a bit of voltage measurement to see what is going on. Unfortunately, I need some tools that I don't currently have available to me to go any further(specifically an oscope). My hope is that the transceiver is in fact self contained and can be removed so that the remainder of the board can be used for an ESC. From that point it's a matter of figuring out the control signals, then plugging in a microcontroller and the appropriate sensors.
Is anyone familiar with any of the other Syma models? The X3 looks quite good and only marginally more expensive than the X1. Looking for my first quad to start flying.