The human body has many miraculous capabilities that we often take for granted. One of the more subtle ones is the variable stiffness of your joints. In technical terms, stiffness refers to the ability to resist a load. Delicately manipulating an artist’s paint brush, for example, doesn’t require much load resistance, but does require fine control. However, that same artist might pick up a bowling ball with a stiffer joint (and, usually, less fine control).
[Christopher Churchill] and some colleagues have a novel mechanical device that can rapidly change stiffness. The device could have applications in robotics and other devices. It can also transmit or attenuate vibration since non-stiff joints don’t pass vibrations as easily as stiff ones.
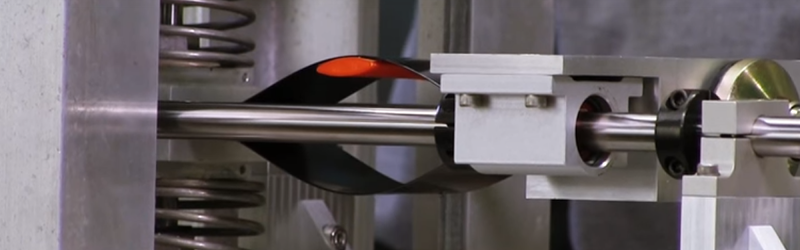
The video below shows the basic idea behind the new invention. The concept is to combine positive and negative stiffness to balance the net stiffness to zero and then make subtle alterations to produce the desired stiffness. Variable stiffness systems aren’t new. Your car’s shocks, for example, are stiff at rest, but springy in motion. However, the new system can change stiffness by a factor of 100 in just milliseconds.













I always figured that for a join you could just have actuator driven springs on each axis, you pull the spring further back, the joint gets stiffer, you release tension on the spring and the joint goes floppy.
This is is a common misconception. Stiffness is the derivative of force with respect to distance, so a spring always has the same stiffness, regardless of how much it is stretched, as long as you keep the spring in its linear region. If you calculate the stiffness of the midpoint of a spring to motion along the springs axis as the spring is prestretched more or less, you’ll find that you just end up with a constant: the stiffness of the spring. The prestretch distance/force disappears completely from the equation. Stretching a spring out of its linear region damages the spring.
Variable stiffness actuators are a BIG THING, btw. That’s because interacting with a variable stiffness world (e.g., going from moving through the air to pressing on a wall) requires variable stiffness actuation to make the control stable.
I did variable stiffness actuator design as part of my PostDoc, so I am quite familiar with the problem. The solutions generally fall into three classes: Design a non-linear spring out of a linear stiffness material, design a mechanism that translates a linear stiffness spring into a non-linear stiffness mechanism (the approach I took), or use a purely electromagnetic system (I haven’t seen much success in this area, yet).
Though you are right to correct on misconception of regular spring, a non linear springs aren’t exactly new or alien technology.
Correct, but non-linear springs tend to heat up excessively with the rapid cycling that they see in this sort of actuation, or are not “non-linear enough” to make a decent variable stiffness actuator. Most of the work that I have seen uses linear springs and actuator geometry to bring about variable stiffness.
The PDF is not behind a paywal! That’s awesome!
The guy in the video skimmed over what negative stiffness is, and also the paper jumps into the hardcore science immediately. This link explains it a bit better
http://www.americanscientist.org/issues/pub/getting-more-stiffness-with-less
Thanks.
The German equivalent of the MIT did a very very very nice job on VSJ and robot safety (and impact on humans and how it translates to safety! that’s one of the most dangerous things about robot arms).
The VS Joints are also pretty important on efficiency. It’s really unefficient to move with a very stiff robot arm. You can even see the arm trembling as the PID or motion controllers try a point per point route that doesn’t account for inercia or unforeseen obstacles! It’s more efficient to start stiff (good acceleration) midway turn into a more relaxed free-moving stance ( better for unexpected collisions and efficiency) and then stiffing up and stopping in the end ( de accelerating).
Basically did this for my degree thesis (albeit mine was more on the “safety” part). But VSJ appeared constantly.
“[Christopher Churchill] and some colleagues have a novel mechanical device that can rapidly change stiffness…It can also transmit or attenuate vibration since non-stiff joints don’t pass vibrations as easily as stiff ones.”
The perfect vibrator? Feel it get stiff, as vibrations increase! These folks could make a fortune on Kickstarter.
How can you actuate the ribbons cheaply? Would hydraulics and bladders on either side of the ribbons work? so each pair has B1 R1 B2 R2 B3 with B1 and B3 connected and doing the inverse of whatever B2 is doing, the same valves would drive the unit on the other side, assuming their action is symmetrical?