Barring the smallest manned airplanes, most aircraft that are pulled around by a prop have variable pitch propellers. The reason for this is simple efficiency. Internal combustion engines are most efficient at a specific RPM, and instead of giving the engine more gas to speed up, pilots can simply change the pitch of a propeller. With a gas powered engine, the mechanics and design of variable pitch propellers are well understood and haven’t really changed much in decades. Adding variable pitch props to something pulled around by an electric motor is another matter entirely. That’s what [Peter McCloud] is building for his entry to the Hackaday Prize, and it’s going into the coolest project imaginable.
This project is designed for a previous Hackaday Prize entry, and the only 2014 Hackaday Prize entry that hasn’t killed anyone yet. Goliath is a quadcopter powered by a lawnmower engine, and while it will hover in [Peter]’s test rig, he’s not getting the lift he expected and the control system needs work. There are two possible solutions to the problem of controlling the decapatron: an ingenious application of gimballed grid fins, or variable pitch rotors. [Peter] doesn’t know if either solution will work, so he’s working on both solutions in parallel.
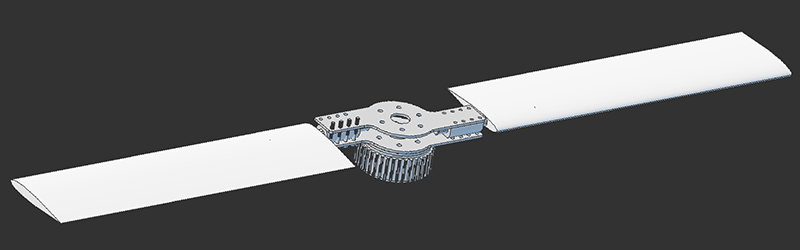
[Peter]’s variable pitch rotor system is basically an electronic prop mount that connects directly to the driven shafts on his gas-powered quadcopter. To get power to the electronics, [Peter] is mounting permanent magnets to the quad’s frame, pulling power from coils in the rotor hub, and rectifying it to DC to drive the servos and electronics. Control of the props will be done wirelessly through an ESP32 microcontroller.
Variable pitch props are the standard for everything from puddle jumpers to acrobatic RC helis. In the quadcopter world, variable pitch props are at best a footnote. The MIT ACL lab has done something like this, but perhaps the best comparison to what [Peter] is doing is the incredible Stingray 500 quad. Flite Test did a great overview of this quad (YouTube), and it’s extremely similar to a future version of the Goliath. A big motor (in the Stingray’s case, a brushless motor) powers all the props via a belt, and the pitch of the props is controlled by four servos. The maneuverability of these variable pitch quads is unbelievable, but since the Goliath is so big and has so much mass, it’s doubtful [Peter] will be doing flips and rolls with his quads.
You can check out a video of [Peter]’s build below.

















It seems like it would take more torque than wireless power could provide.
No need for wireless power, just coils on the props and permanentmagnets mounted on the base part of the hub. There you have power from a nice little generator embedded on the prop, as long they are rotating of course…
This hasn’t been documented yet, but also looking at having a small LiPo to handle start up and power failures.
It’d be simpler and less complex to make a simplified version of the regular helicopter system that’s been perfected over decades.
All you need is a collective pitch system, a swash plate that only goes up and down, no tilting. The servos to control the rotor pitch can be mounted near the middle of the quad, with shafts running along the arms to a crank, connected to the swash plate.
You could use rigid mounted rotors, just the feathering hinges, no teetering hinge or flybar. Adding cyclic pitch is where the complexity would multiply.
I agree that this seems like a complex solution to a problem that has already been solved. The Stingray 500 Quad that is mentioned in the article does this on a small scale by re-purposing parts from the tail rotors of RC Helis.
Clever idea to control the props over wifi, I can’t see any way that could possibly cause any trouble. Nope none
It’s over a distance of a couple of cm, would take a pretty dedicated hacker to mess with that. I suppose you could have a system where each prop talks to the master, and if it can’t get a connection to all of them, it tells the ones it can talk to, that the system has failed. Props which can’t connect will also internally mark themselves as “fail”. Then in a fail situation, all props default to a pre-set pitch. So at least they’ll all be the same, so it’ll still fly evenly and be able to land by decreasing power.
As a permanent solution he could switch to using IR, or optical, or magnetic coupling, or pretty much anything. Just the ESP chips are an easy solution for Peter to prototype with.
Part of the reason why he isn’t getting the lift he wants is that shape of the prop itself isn’t correct. A good prop design will have about 15 to 20 degrees angle of attack at the hub tapering to nearly zero at the tip. The part of the prop at the hub will be moving significantly slower than the part near the tip and will thus be producing significantly less lift for the same given angle of attack. The angle of attack at any point along the prop should be an inverse function of the radius at that point. The camber of the prop should also be thicker at the root.
The current props do have greater pitch at the root, about 18 degrees and 4 degrees at the root.
You do realize this is already in use very heavily on RC Helicopters (both main, and tail rotors) , as well as some planes dont you? You arent doing anything new AT ALL.
Well, maybe the wireless power , but that just seems silly.
The difference is that the servos and the electronics are all onboard, eliminating some of the mechanical complexity. Though the overall system might be more complex.
You do realize this was mentioned in the summary above….did you just feel the need to leave a dickish comment anyways? I don’t see where Peter, or anyone else, claimed this was brand new and had never been done before.
Wait wait wait, are you saying that all other 2014 Hackaday Prize entries have killed people?
Why so surprised? Those Arduino projects are kinda deadly, you know.
They put them all in a pumpkin cannon launched tube sat and the countdown went past zero and someone looked to see if the barrel was obstructed…. set a record for non-vegetable object launched by one though.
cube sat dammit…. I swear there’s a nerve cluster between my brain and fingers getting all auto-completey.
A tube-sat would be a better fit for that pumpkin cannon.
There have been acrobatic quads with variable pitch prop systems for YEARS. This is nothing new.
I think he probably adding more complexity than he needs. But I have yet to see a collective pitch quad with an engine this big.
One concept helicopter with fly-by-wire system was made. The Sikorsky X2. But now… this should be properly called fly-by-wireless.
I’d consider using rotary transformer as a part of isolated DC-DC converter to power the servos. This shouldn’t require too hefty core to power two standard-class servos per rotor.
I second the rotary transformer notion. I used one from a VCR for a pov display a while back.
I’m not too impressed by this design, it feels to me like there must be a better way to achieve this.
I’m sorry about being so negative but I went for honesty in my comment.
There must be a better way but you are too much of an idiot to come up with anything?
Sorry, just went for honesty in my comment.
There are better ways. The ones that have been in use for decades now. Tailrotors of helicopters. Or variable pitch props on planes. Or even RC aircraft just as the variable pitch acro quads. They all use a tube for a propshaft and the hole has either an actuated shaft or a hydraulic line going through it, while the actuator is sitting on the chassis of the aircraft.
I love electronics, I really do.
But I suspect in this case that it would be easier to mount a control servo on the frame (i.e. not rotating) and then use mechanical means to turn that movement into blade pitch. I.e. have a look at helicopter tail rotors.
I’m sorry but I must protest…!This seems like a really poorly thought out design by someone trying to project their knowledge into a field that that is very different than their own and the results will not be pretty.
The forces on those blades seem much to high for a small servo to handle accurately and constantly… perhaps I’m wrong but I think there are very good reasons to work towards the “complex” mechanical design of helicopter blade pitch than this ill attempt.
If you think helecopter swash plates and tail rotor pitch mechanisms are complex perhaps you should rethink your endeavors.
“trying to project their knowledge into a field that that is very different than their own and the results will not be pretty.”
This describes half of the commenters on Hackaday these days.
Specialization is for insects :-P
I’m really curious what kind of forces the servos will need to handle to hold a particular angle of attack. I’m also curious as to the drag the alternator will add to the rotor.
Do you plan on trying to get the servos to act independently and use a position sensor so it can basically be a virtual swash plate? I have no idea if that would benefit a quadcopter though.
Matt,
The project logs have more details, but each blade requires 15.5 kg-cm of torque at full thrust. The power required for the electronics and servo is about 50W, so 200 W total. The total power is about 22kW, so the drag from the alternator is about 1%.
I love your idea about a virtual swash plate. This hadn’t crossed my mind, but since the blades act independently, the system could easily be modified to act in that manner. Could be useful to get a higher forward speed. The bearings would likely have to be upgraded. Thanks!
Ah, I see you have worked the maths.
To toss an idea out there in case the wifi doesn’t work out is something I’ve wanted to try on a POV display. I wanted to see if I could get data to the rotary part of the display optically, The idea was either to have something like an acrylic ring on the rotary element that acts as a light pipe for a reasonably bright LED or a stationary ring of LEDs for the sensor. Even if it works indoors, it could be really challenging to get it to work in direct sunlight even with everything shielded from sunlight. But at such a short range the wifi will probably be fine without resorting to the ramblings of a random HaD commenter :)
I don’t really know about helicopter flight other than the basics, but with 4 rotors acting as if they have their own swash plates, could they be used to add extra stability such as in a cross wind or allow the craft to better maintain it’s pitch, yaw, and roll in a hover? This may be totally new territory for multi-rotor aircraft through and maybe the data doesn’t exist on this yet.
Honestly, I doubt that a hobby servo (or any geared actuator) would withstand long time in “virtual swashplate”. This is because cyclic pitch adds sinusoidal component to its motion, on relatively high frequency, even beyond bandwidth of hobby servo, as opposed to only changing collective pitch. The gear set would quickly develop play. A direct drive BLDC motor or a voice coil would be more suitable, but dimensions would become quite hefty.
The idea is nice, but a bit of turbulance and those blades are going to hit a nice eigenfrequency and shake themselves and/or the quad to bits. If it doesn’t fly off and kill someone before that. The servo control on the average hobby servo is not nearly stiff enough for this application.
The guy that designed the quad on Flite Test has his own site and a product line which includes the TDP Manta Ray which he says has been tested with a two-stroke engine: http://www.curtisyoungblood.com/platforms/tdp-mr/
I found some excerpts from the assembly manual:
http://www.dronetrest.com/uploads/db5290/257/ff50601f21b07ade.JPG
http://www.dronetrest.com/uploads/db5290/258/5528b36f4cecea0c.JPG
Or you can do nothing of this sort…
You simply [sic – understatement] design your propeller depending on the material they are made from and how the shape deforms dynamically depending on the speed they are rotating at (you can include other parameters to improve efficiency). The “variable” pitch that results is not near-optimal, but-pretty good compared to a “Rigid-Body” propeller. The concept is well known. Yes, this approach will not work well for large ranges of altitude where air density and temperature varies significantly – but it does work well for applications like propellers used on RPV’s – airplanes and/or drones, that work below several thousand feet AMSL. I consider propellers like this to be existing technology. However, expect a “Frivolous Patent” challenge from some “Bloated Corporation” and/or a “Patent-Troll Lawyer” that will preventing you from using the time-honored concept commercially. If it hasn’t been said before, I think this would (obviously) be called: “Passive Variable Pitch”, or “PVP”.
Possibly a trim tab on each blade could set the blade angle of attack. Trim tab position could be controlled by a servo receiving power/signal through the shaft on each blade.
great but useless. The helicopter is much more efficient (cca 35-40%) as a quad. That’s because the Reynold numbers. If you want to make a better mechanic work on helicopter-one. 4 simpler mechanisms for quad are more complicated in their sum as a simpler heli mechanism..:)
We wait a heli-mechanism with wireless and direct-drive
. Much smarter..:)