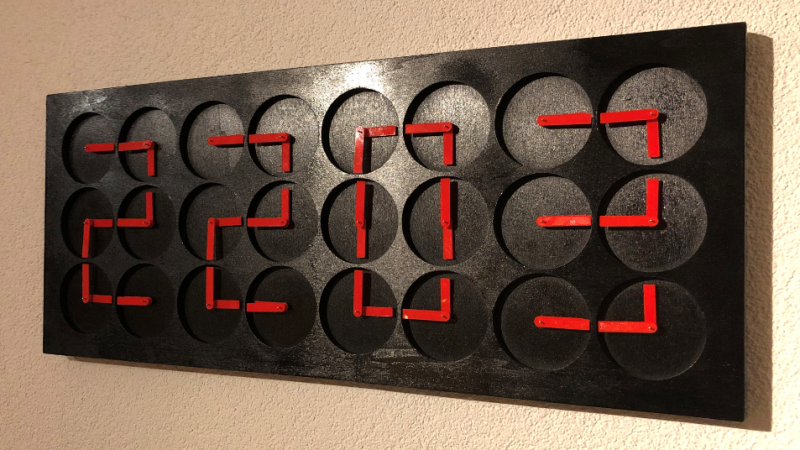
Have any last-minute projects you finished just before the end of the decade? To help pass the time, [Erich Styger] decided to build a meta digital clock made up of 24 individual analog clocks, the perfect item to help welcome in the new year. The stepper clock is controlled by a network of LPC microcontrollers, displaying the time and room temperature, as well as several aesthetically pleasing loading animations.
Each clock operates from a 5 V USB power bank drawing less than 2 A for the full 24-clock setup. The meta-clock resides in a laser cut enclosure, with 3D printed hands telling the time. While having one board per clock would be easier to implement, [Erich] decided to use one board per four clocks arranged in rows to save on costs. The arrangement fixes the distance between clocks, though [Erich] also made the clock size slightly smaller to compensate.

The ‘stepper’ part of the stepper clock uses a 360 degree version of the VID28 stepper motor to reduce the height of the design and the cost of the project. Apart from the X12.017 driver silently driving the motors, the stepper motors also conveniently only need a ‘direction’ and ‘step’ pin, reducing the pin count needed for the microcontroller. Neodymium magnets and hall effect sensors are used for tracking the position of the hands as the clocks move, with the magnets embedded into the clock hands.
As for communication, rather than use the common I2C protocol, the more robust RS-485 was selected. A master coordinates all of the clocks using the bus, providing a command line interface. The master is also able to communicate with the host PC over USB to maintain RTC time.
During the software development phase, [Erich] made use of the SEGGER J-Link EDU mini CLI for keeping track of information about the driver and each individual stepper motor. The software controlling the motors is written in C, with boards running FreeRTOS. The stepping is handled with a timer interrupt, but because the LPC845 doesn’t have enough timer channels, all of the functionality is done within a single channel. This results in plenty of interrupt handlers, flags, and callbacks across the code, which makes for some good fun.
Speaking of clocks, check out some of our other past clock hacks, including this mini-VFD clock and this fun LED matrix clock (it lets you play Tetris!)















That is actually cool. I’ve seen a lot of clock variations, but this one is pretty clever, IMO.
That’s really cool. I was actually working on an entry for the clock challenge but now there’s no point.
Black third arm would allow to get rid of non active segments, otherwise very nice clock
You could add a fixed black arm in eg 45 degree (7.5 min past) and park not in use arm below
Dieter Zech (referenced in the article, see as well his images posted on http://www.dize.de/bcd/) did exactly that, but has dropped that idea. I did consider that idea with a ‘blanking hand’, but dropped that idea too. While it works great for a clock only showing the time (digits), it would not be good for a clock showing animations, as this would ‘hide’ the animation in that place too. So really what would be the perfect solution is a third clock hand controlled by a stepper motor: I already tried to build my own dual-shaft stepper clock and this was already challenging, so a third hand/arm would make it even more complicated. The other idea I had was to illuminate the hands like they are on a dashboard cluster: I keep that one for a possible next iteration :-)
That’s what I was thinking, LED strips on the hands, that would be perfect.
If you could make the hands a black/red e-ink display, that seems like it would be ideal. But it’d probably be tough to source the right size (and expensive).
umm… by the “End of the Decade” with Jan’s suggestion, this will be even cooler ;)
now build a digits form this and call it a fractal clock :)
I was hoping to see the minutes pointer spin like crazy to move the hours pointer.
Still, very cool implementation! Didn’t know you could get the dual instrument motors.
Yes, there are automotive stepper clocks for ‘real clocks’ with only one stepper motor and a gear connecting hours and minutes. Here you have to spin the minutes pointer to advance the hours. The individual dual shaft ones with two independent pointers are mostly used for showing two things on the same spot, e.g. motor pressure and temperature (or something like that). They are not as common and not as cheap as the ‘single shaft’ ones. I have found two different variants: the X40 which basically has two motors stacked on top of each other and the VID28 which has put them on the side of the shaft, everything connected with gears.
Too bad some lawyerly types sent him a takedown:
—- snip —-
Human since 1982 claims
“Human since 1982 have the copyright to works displaying digital time using a grid arrangement of analog clocks…”
I’m not a lawyer, but without obligations (imho) I have removed the content.
Thanks for understanding,
Erich
Yes, I received exactly that.
Not a lawyer, but pretty sure you can’t copyright an idea like ‘displaying digital time using a grid arrangement of analog clocks’. Perhaps a design patent? Even then, sounds suspect.
agreed, to my undestanding you cannot have a copyright on an idea. That’s why they word it as ‘works’ or ‘design’.
Yep, can only protect a specific implementation or algorithm, not a general idea. If that were the case then one of the really big clock/watch companies could go after and bankrupt “Human since 1982” (which is the silliest company name btw) for infringing on their “using mechanical hands to represent time in any capacity design”. This is the sad case of a company with more resources than an individual strong arming them into submission by the threat of legal action (which is not only immoral, but would certainly not hold any weight in an actual court if the individual had the resources to hire competent legal representation to fight it). I really hope that such blatant abuse of copyright claims by “(In)Human since 1982” is rewarded in the near future by legal action against them by an even bigger fish.
As a follow-up: I wrote an article about it and how copyright affects makers (or educators), with the hope that you find it useful: https://mcuoneclipse.com/2020/02/24/copyright-law-for-makers-and-educators/
And: there is a now a Chinese clone available on the market:
https://www.aliexpress.com/item/1005002075204527.html
http://clockclock.gitee.io/instruction/