[Arnav Wagh] has been doing some cool experiments in soft robotics using his home 3D printer.
Soft robots have a lot of advantages, but as [Arnav] points out on his website, it’s pretty hard to get started in the same way as one might with another type of project. You can’t necessarily go on Amazon and order a ten pack of soft robot actuators in the way you can Arduinos.
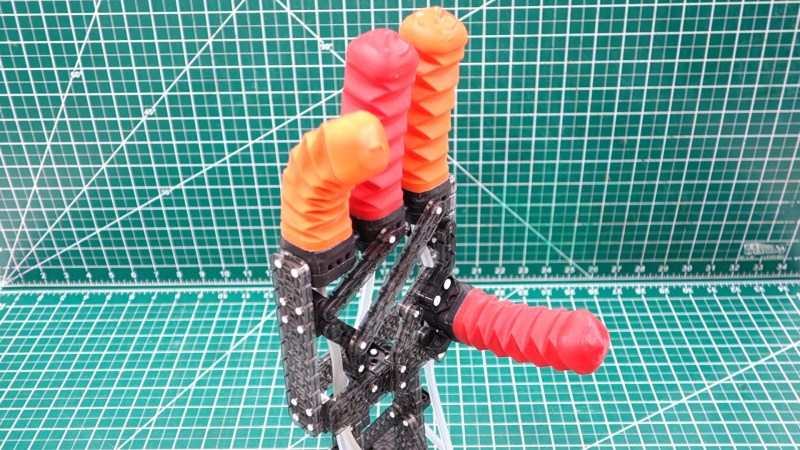
The project started by imitating other projects. First he copied the universities who have done work in this arena by casting soft silicone actuators. He notes the same things that they did, that they’re difficult to produce and prone to punctures. Next he tried painting foam with silicone, which worked, but it was still prone to punctures, and there was a consensus that it was creepy. He finally had a breakthrough playing with origami shapes. After some iteration he was able to print them reliably with an Ultimaker.
Finally to get it into the “easy to hack together on a weekend” range he was looking for: he designed it to be VEX compatible. You can see them moving in the video after the break.














There are quite a few companies that sell custom pneumatic suction cups for industrial robots. If you’re polite they might even send you free samples of some of the long thin bellow types. Stick a couple together perhaps with a spring in the middle and you’ve got a ready made repeatable solution.
Getting your actuators to hit absolute locations would be a cool demo, air is kinda funky to conduct with cause its always pushing in all directions, but theres solutions.
Thanks for making that, a useful finished product would be an actuatable puppet that is printed in 1 piece. id love to see that, then theres only 2 more things then its a robot! just a battery and a brain+sensor. but maybe youd need an oscillator to run it as well, depends on what you do tho.
Argh, accidentally reported this comment with a misplaced click! Doubly annoying as positive, interesting comments like the one above are a lot of why I come here so often.
HaD, please put a confirmation prompt on reporting comments!
Absolute locations would be useful. But most of ‘soft’ robotics is about being delicate – control of the forces applied not positional accuracy. Use a standard screw driven actuator mechanisms that runs on positions and you need feedback to not break stuff you are gripping, where soft robotics you are starting from the other side and applying a know force so you don’t need feedback to avoid breakages.
When you want perfect position it requires active positional feedback which depending on the soft actuator can either be almost impossible or rather easy to fit in the actuator – in the end often better off using vision systems to watch it stop where you want it to. Where a stepper motor (assuming no skips) does not need anything more than to know where it started.
This reminds me of the pneumatic silicone robotic tentacle I saw on youtube once. I’m pretty sure it was featured here, but I didn’t feel like searching for it. I did find the youtube video, though:
https://www.youtube.com/watch?v=EkPeF-sYQ-0
Robotic French Fries.