
Pedaling in place isn’t the most exciting pastime, so it’s no surprise that modern technology is being used to make the in-home biking experience a bit more interactive. With a stand on the rear wheel providing resistance, and a movable steering plate under the front to read the handlebar angle, you can now use your standard bike as the “controller” in a virtual environment provided by software such as Zwift.
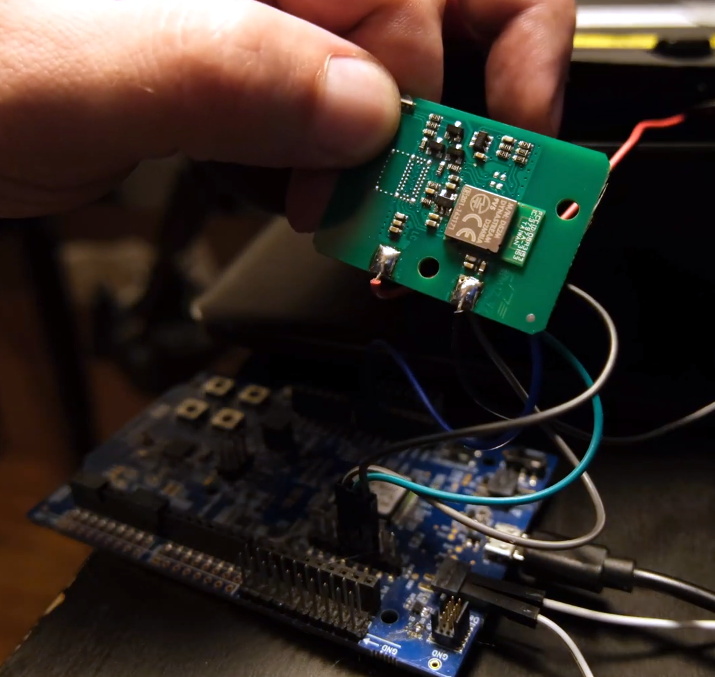
[Keith Wakeham] wanted to take a closer look at how Zwift communicated with his Sterzo steering device, and it turned into a pretty epic bout of exploration and reverse engineering. As the video after the break shows, he didn’t just go from sniffing the device’s proprietary Bluetooth Low Energy (BLE) communications protocol to figuring out how to emulate it in software so you could roll your own Zwift peripheral. He also tore the device apart, pulled the firmware from its microcontroller, and postulated how you could build your own low-cost clone device that would work with the existing software.
Even if you have absolutely zero interest in virtual biking, the video [Keith] has put together for this project is really a must watch. Have you ever wanted to sniff and reverse engineer BLE communications? Looking for a real-world example of pulling the firmware off of a consumer device? Maybe in the market for some tips on how to identify unknown ICs on a board? All of that, and quite a bit more, is covered in this nearly hour long hacking tour de force.
On the other hand, if you are interested in adding your own hardware to Zwift, then this look at getting an unsupported stationary bike working with it should be useful.














I am a Zwifter and have been after a Sterzo for my trainer. Here in the States, so far, you can’t find them and the Amazon offering is not the smart unit.
*pedaling. That is all for now; I’ll read it later with my coffee.
I like peddling more better.
This is a pretty epic reverse engineering hack. That said …
These steering plates are almost useless. The reason is simple – when one rides a bike, one doesn’t really steer by turning the handlebars (bike is not a car!) but by leaning into the turn. Having to turn the handlebars while pedaling at speed is actually pretty disturbing and could make you fall off the trainer (and possibly break the trainer or your bones).
I have actually reverse engineered the BlackTrack from Tacx few years ago, which is the same idea (just uses ANT and not BLE) because we were trying to build a virtual reality bike simulator. It was completely unusable because everyone was instinctively trying to lean instead of turning the handlebars. Worse, the Tacx steering plate has a large deadzone in the center, so you really need to turn the handlebars a lot – which is a completely unnatural thing to do at speed.
Maybe with a screen it is less problematic (haven’t tried) but with an HMD it was terrible. And without steering/leaning (e.g. by making the bike really rigid or using a stationary bike) you get motion sick after the first curve on the track …
Sega figured out 33 years ago. But Super Hang On is quite a hefty arcade machine. I don’t see how it can be done any other way. They still make motorcycle arcade games like this to this day.
I think I have seen a home simulator project trying to do this on Kickstarter a few years ago using some massive spring dampers to support the motorbike but no idea what happened to it.
This is a big issue, ideally you would need a motorized setup and not just springs to permit the leans and to simulate the centripetal forces while cornering at speed but that would be way outside the budget of most enthusiasts.
I am just wondering what are these cycling trainer vendors thinking this expensive and crappy steering plates are good for. Maybe navigating menus without getting off the bike – but then Tacx supplies a small wireless “button box” with 4-way button cross to be fixed on your handlebars for that purpose …
I’ve actually been thinking about this. I’m generally “the strain gage (gauge) guy”. Developed commercial powermeters, my original design was featured here, and did a video trainer with integrated weight scale demo as a method to stop weight doping. I’m actually contemplating a second video with 1) 3d printed steerer that is corrected for fork angle and 2) strain gage handle bars to steer by force.
The problem is not sensing the rider’s input (handlebars angle/lean angle) but actually mechanically supporting the bike that would permit to safely lean into the corners and to easily return back upright.
That would require a pretty beefy mechanical contraption, ideally motorized and linked to the simulation. None of the commercial trainers do this, they are all designed only for pedaling in an effectively straight line (you don’t need to turn to exercise but you do need to be able to turn if you want to provide a virtual biking experience).
I have made a lot of true cycling and skateboarding simulators. I need to create an entire smartbike because the current trainers are made to be static and not dynamic. Check ou my links. These are large scale prototypes.
I’m surprised it was done with a plate under the wheel – a sensor strapped (and removable) to the fork and stem should work at least as well. But as @janoc200 says, that’s not how you steer. A leanable, heavy-base bike mount sounds like a valuable product… and then drift-like steering for BMX can be done if you combine that with the steering plate.
Such as:
Bowflex’s Velocore https://www.bowflex.com/bikes/velocore.html
Realryder https://www.realryder.com/
but those are both exercise devices, not stands for actual bikes.
I followed the bowflex link.
Having the monitor stationary in the middle while the bike is leaning looks very un natural too from the pictures, but I haven’t used the thing.
It is done like that because it is easier to make universal. You use your own bike on these trainers, any wheel will fit onto the plate but bikes differ widely in the construction and it would be difficult to make a one size fits all mount/sensor that would fit every bike.
I’ve long been interested in building a bicycle simulator rig for some tolerable indoor exercise, but the sorriest part of the existing material is the software. Most of it is basically a prettier version of the LCD display on an old exercise bike – you can see a 3D bike going down a path, but often you can’t steer, and if you can, your travel is very limited as seen in the video here and effectively offers nothing more than perhaps letting you choose between passing and crashing into a competitor. I’ve only once seen good bicycle simulator software, it was on an arcade game that simulated riding a mountain bike complete with a bike to sit on connected to a motion simulator, you could steer all around a large path to choose a route around obstacles, the pedaling resistance varied, and it actually felt a bit like riding a bike.
Without the motion simulator, it might be better to hook up a gamepad analog stick to a handlebar for steering and body lean fore/aft, with a few buttons for shifting etc. and a couple of analog triggers for brakes.
A thought crossed my mind recently, that the 2nd-best bicycle simulator software I’ve seen is probably one of the Grand Theft Auto series :-P