
Joysticks are great for gaming, but sometimes it’s hard to find one that suits your personal playstyle. [Nixie] developed the TinkerJoy to suit their own needs, while giving it a modular design to make it easy to customize as well.
 It’s built around a metal core, with 3D printed panels attached to the user’s liking. In addition to the body panels, parts like the trigger assembly and button panels can be moved around and adjusted to suit different games or different players.
It’s built around a metal core, with 3D printed panels attached to the user’s liking. In addition to the body panels, parts like the trigger assembly and button panels can be moved around and adjusted to suit different games or different players.
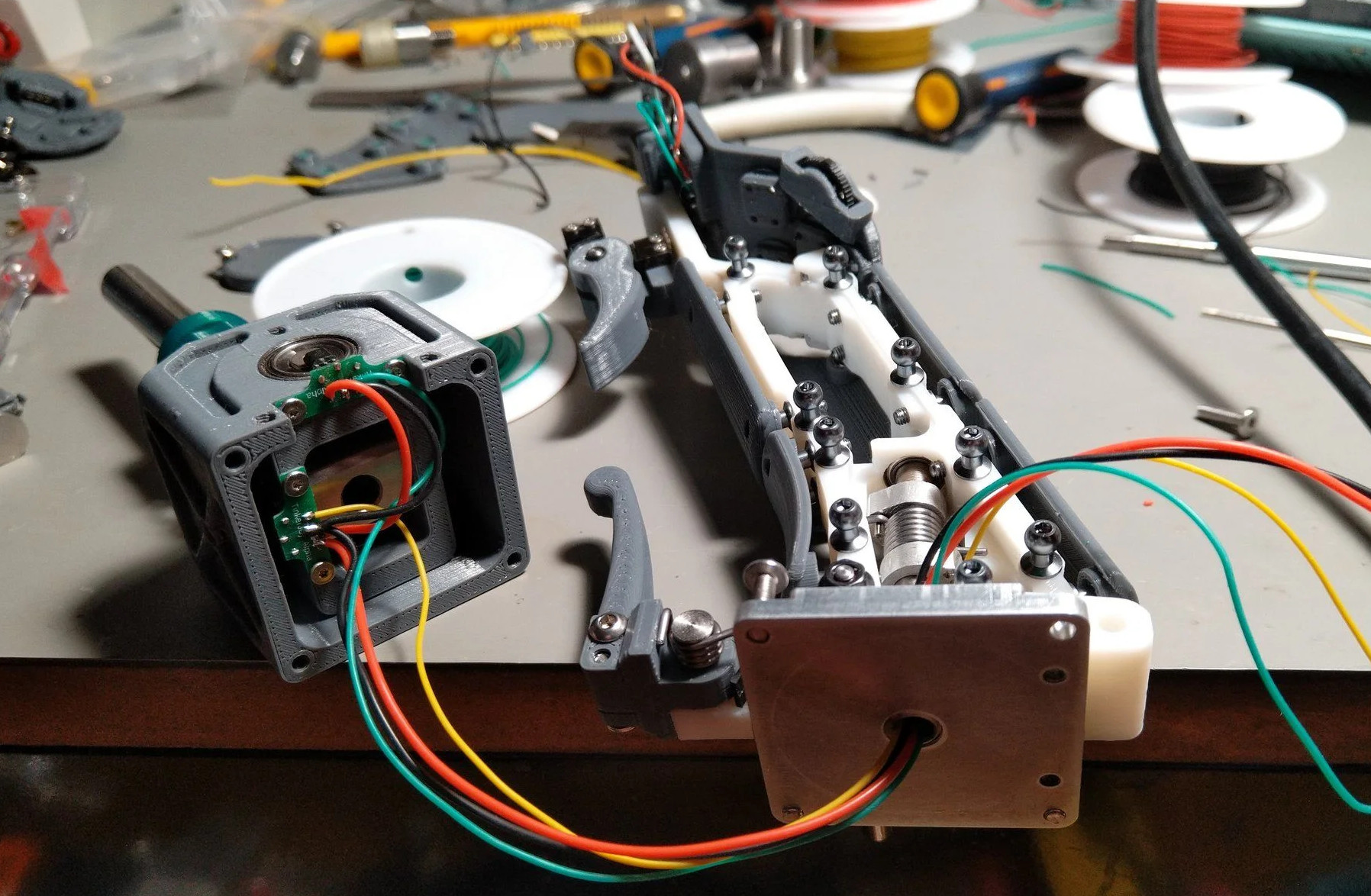
A test unit has been built in a right-handed configuration, featuring four buttons and two switch sliders. In addition to the main X and Y axes, it also has a Z axis activated by twisting the joystick, as well as an analog brake. There’s a trigger, too, as every good joystick must have. For now, the electronics is not integrated. Instead, a STM32 BluePill board sits on top of the stick to read all the controls and talk to a PC. The test setup looks to work well, with [Nixie] putting the gear through its paces in Star Citizen.
The benefit of building your own hardware is that you can often do ergonomics better yourself. After all, companies often have to build for the 5th-95th percentile for reasons of economics and scale.














This is based on the freejoy project using hall effect sensors and magnets for the 5 axes.
Firmware is on a custom, built in stm32 bluepill clone.
Lovely work!
Thanks!
Good choice for a project, no deadline until it needs to be finished. (sorrynotsorry)
I can tell myself I have ALL the time in the world to finish them, before the game releases. (sorry, the joke had to be made).
I actually expect the joysticks to be functionally finished by the end of summer. (not all pieces in metal, but at least it won’t have dangling cables either).
ive always said id give sc a go when its done. i wonder when that is going to happen.
my own personal joystick shenanigans involve a bunch of cast aluminum gimbals i got from a military surplus store on ebay. i could never figure out what they were used on. but they are frictioned ball in socket style with gear trains to convert the 30 degree rotation of the axes to 180 degree, which makes them perfect for hall sensors. i salvaged grips from various e-waste controllers. but i wanted to move to printed grips (perhaps using the playdough+photogrammetry method).
i think a thing i wanted was to keep the grips self contained and use an i2c interface to talk to the main microcontroller using a plug and play interface. every grip would have 4-pin connector in the base which slots into a receptacle attached to the gimbal. perhaps even store their own mappings so switching games is as easy as switching grips.
You have plenty of time to try SC, but also keep in mind there are about 4 FreeFly events per year, so you could try it for free anytime.
Interesting gimbal descriptions!
Your idea of having full grips with internal mappings sounds really interesting.
Hey Nixie, while those look great,, don’t you think it would be much better having those mounted to a movable, customizable mounting system, so as to add to the level of adjustability? If you would like me to design something for you, Predator Mounts would be glad to help out. As I’m sure you know, we do have a little experience with mounting things…
hope this project is not used to launder money either! ;)
LMAO.
I wish, but the possibilities that this project ever turns profit (ferengi face) is so small, an electron is still asking where are them.
I love the idea of using a thumbstick for vertical and horizontal thrusters!
It makes for intuitive movement while on the same stick, at least the short tests I have done now. Technically speaking, I could fly now with only one joystick, as I have all controls (all analog except for forwards-backwards, wich are digital, but using the speed limiter I can just make them as fine as needed).
I am still going to build it as a HOSAS setup and have two joysticks, since there are so many controls for so many things (vehicles, weapons, mining) that I feel a single joystick is not gonna be enough.
At least they have something to keep them occupied while they wait for SC to exit its 13 year “but it’s in alpha” phase.
Nixie’s always up to something cool. Great work man
Thankyou!!!
I’ve always wanted to do something like this but I never knew where to even start.
Go check reddits “HotasDIY”, that’s a good place to start seeing what other people do, and then do your own thing!
If you want, you can ^^