Researchers at North Carolina State University have created a soft robot that moves in a distinctly caterpillar-like manner. As detailed in the research paper in Science Advances by [Shuang Wu] and colleagues, the robot they developed consists of a layer of liquid crystalline elastomers (LCE) and polydimethylsiloxane (PDMS) with embedded silver nanowire that acts as a heater.
The LCE is hereby designed as a thermal bimorph actuator, using a distinct thermal expansion coefficient between the LCE and PDMS sides to create a highly controllable deformation and thus motion. Since the nanowire is divided into sections that can be individually heated, the exact deformation can be quite tightly controlled, enabling the crawling motion.
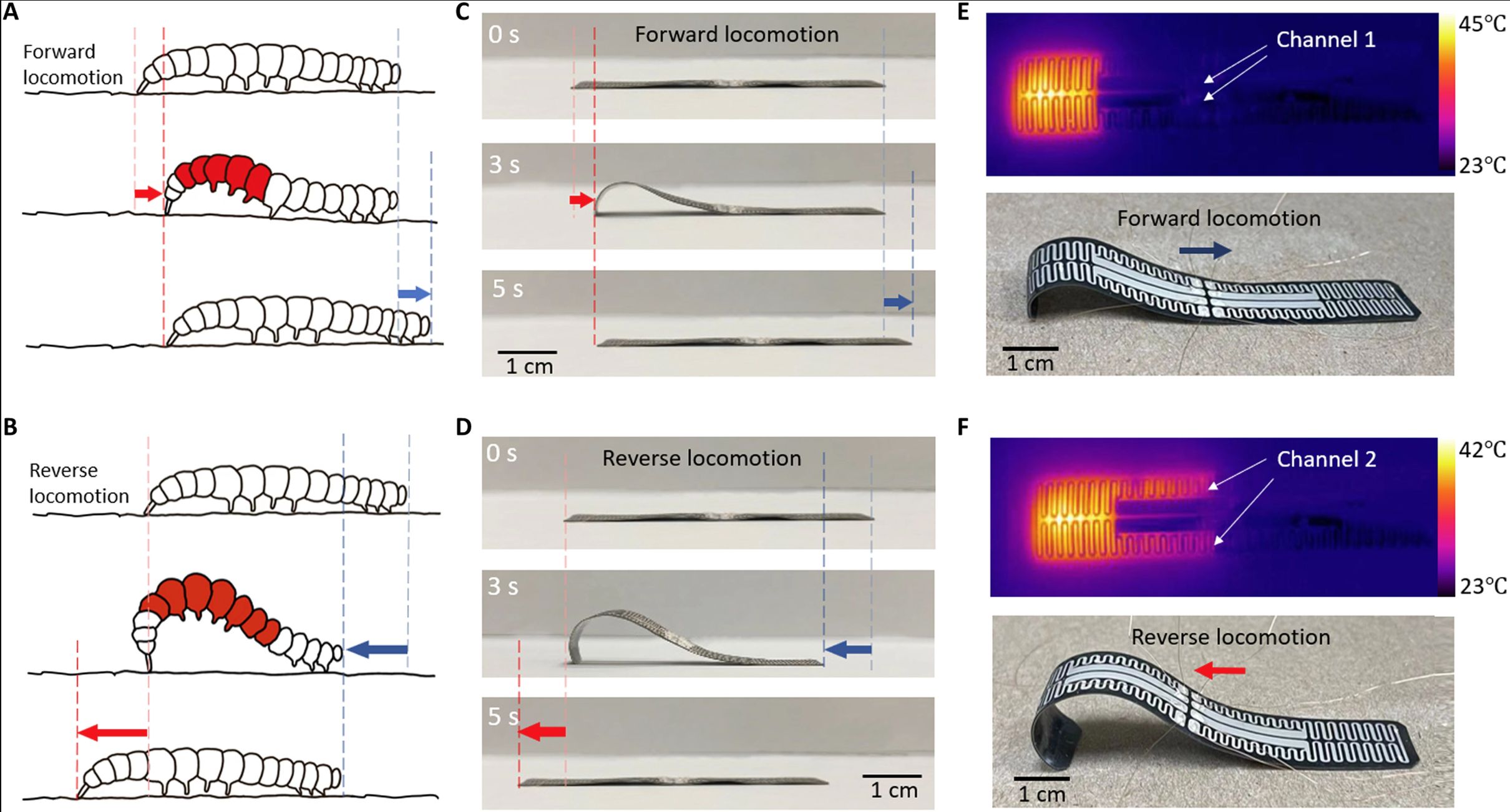
As can be seen in the video below, the motion is fairly rapid and quite efficient, as well as decidedly caterpillar-like. Although the current prototype uses external control wires that supply the current, it might be possible to integrate a power supply and control circuitry in a stand-alone robot. Since the heater works on low voltage (5 V) and relatively little power is required, this would seem to make stand-alone operation eminently possible.














They need to put a little cute happy face on it, maybe as part of the pattern in the resistive heater. This would help publicity and grant funding greatly
nah, they need to paint it yellow and black to deter drones from eating them.
I just learned the word for that this week:
aposematism
(of course, I knew the concept since elementary school, but this SAT word came later)
maybe a flexible oled on top to show googly eyes?
As a robot actuator, the important question is how many times it can be actuated before it starts to break down. If it only actuates 1k times before having issue then it’s not useful but if you make it to 1M times then it has serious potential.
Durability was also my first thought. But what about payload? With a payload, it wouldn’t be able to crawl under a “box”. Not much utility in the demo other than proof of concept. And we don’t need something that’s almost as fast as our Congress.
Very cool research. Hopefully the challenges can be overcome, and the technology applied in the real world. I’m also looking forward to the book, The very hungry thermal bimorph actuator.