Normally when you hear the words “rope” and “dog” in the same sentence, you think about a dog on a leash, but in this robot dog, the rope is what makes it move, not what stops it from going too far. [Aaed Musa]’s latest project is CARA, a robotic dog made mostly of 3D printed parts, with brushless motors and ropes used to tie the motors and legs together.
In a previous post, we covered [Aaed Musa]’s use of rope as a mechanism to make capstan drives, enabling high torque and little to no backlash. Taking that gearbox design, tweaking it a bit, and using three motors, he was able to make a leg capable of moving in all three axes. He had to do a good deal of inverse kinematics math to get the leg moving around as desired; once he had the motion of a step defined, it was time to build the rest of the dog.
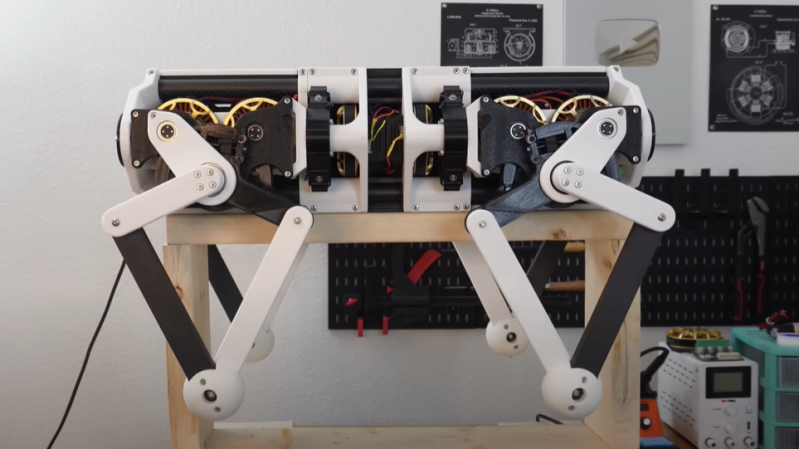
CARA is made primarily of 3D printed parts, with several carbon fiber tubes running its length for rigidity. The legs are all free to move not only forward and back but side to side some, as in a real dog. He uses 12 large brushless motors, as they provide the torque needed, and ODrive S1 motor controllers to control each one, controlled over CAN by a Teensy 4.1 microcontroller. There is also a small BNO086 IMU to sense CARA’s position relative to gravity, and a 24V cordless tool battery powers everything.
Once assembled, there was some more tuning of what type of motion CARA’s legs take while walking. There were a few tweaks to the printed parts to address some structural issues, and then a good deal more inverse kinematics math to make full use of the IMU, allowing CARA to handle inclines and make a much more natural movement style. [Aaed Musa] does a great job explaining his approach on his site as well as in the video below; we’re looking forward to seeing his future projects!
CARA isn’t alone on this site—be sure to check out the other robot dogs we’ve featured here.














Almost $2.5K on odrives alone. Computation, brushless motors, power regulation, and custom structural parts are cheap now but damn, the controllers to handle low level motor control are still such a hit in the budget.
Kinda surprising you cannot repurpose 3d printer controllers there. sure those are for steppers but they are sorta similar and the feedback via magnetic fields and electric load should be the same. I have to think about that a bit.
Simple FOC has a setup for FOC stepper controllers using simple h-bridges, but because of the high amount of poles, you need an incredibly precise encoder to run them smoothly
Capstan drives are very interesting. Given the level of torque needed in this robot, it seems like it would be more effective to design a motor specifically for torque than to purchase premade (and very expensive) ones that can reach the level of torque needed because they are also focus on other unneeded attributes (like speed).
Pancake brushless motors are good for that but last I checked they are really expansive.
You can’t get power without speed. In a walking robot, you’re facing a highly dynamic situation where you have to have both speed AND torque – sometimes simultaneously.
The problem with electric motors is that generating torque is inefficient because of how weak the magnetic forces are. That’s why most motors use speed as a substitute and gear it down.
Seeing as how those motors were intended for multi-copters I wonder if the bearings will stand the load perpendicular to the axle in this application.
They deal with a lot worse with the vibrations and gyroscopic precession of rotors.
such intricate static leaning implemented but still insists in that stiff legged turning all these ‘dogs’ have. Hope he improves on that over time.